В чем разница синхронный и асинхронный двигатель: Отличие синхронного от асинхронного двигателя
Синхронный, асинхронный – какая разница?! — Электродвигатели для складского и подъемно-транспортного оборудования – Склад и техника
И. Станкевич
Обычно о том, какие электродвигатели стоят на том или ином оборудовании, его владельцы особенно не задумываются, но только до тех пор, пока они не выходят из строя. А уже первые «болезни» этих «скромных тружеников» вызывают коллапс необъятных потоков грузов. На склады России поступает много иностранного подъемно-транспортного оборудования, и читателям будет интересно узнать, какие существуют типы и исполнения электродвигателей, работающих в этих машинах и механизмах.
Электродвигатели – непременная составляющая подъемно-транспортного и автоматизированного оборудования: конвейеров, автоматизированных складов, штабелеров, упаковочных автоматов и иной складской техники. Обычно эти агрегаты подбирают для своего оборудования сами изготовители, но все чаще бывает так, что покупатели и владельцы машин сами могут выбирать электрические силовые агрегаты для нужд своего предприятия в зависимости, например, от специфики условий работы отдельных его участков.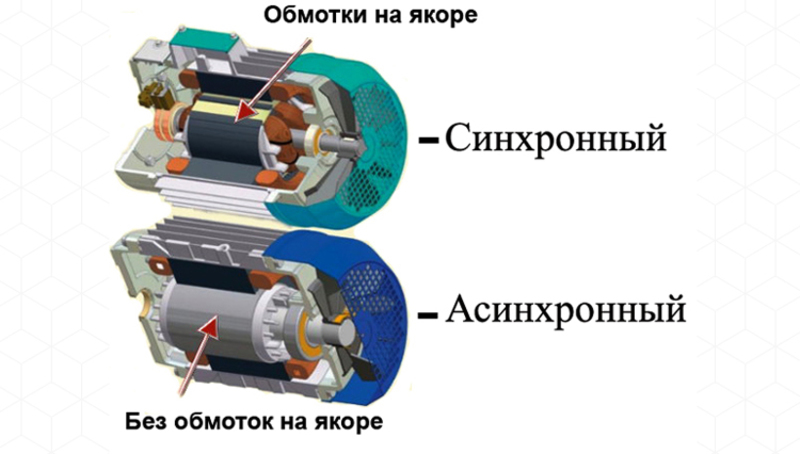
В складском и подъемно-транспортном оборудовании наиболее широко применяют электродвигатели пяти типов:
- электродвигатели постоянного тока с возбуждением от постоянного магнита;
- асинхронные электродвигатели переменного тока. Их применяют в оборудовании непрерывного цикла, например, в обычных конвейерах;
- серводвигатели (сервомоторы). Они работают в машинах, которые должны совершать точные движения, перемещать и позиционировать грузы на строго определенные места: в штабелерах, автоматических складских системах;
- линейные асинхронные двигатели. Используются в оборудовании, для которого важна прежде всего высокая скорость работы, например, в сортировочных машинах;
- мотор-ролики (или мотор-барабаны), т.
 е. ведущие герметичные ролики, внутри которых заключены небольшие электродвигатели и редукторы. Используются для привода конвейеров, работающих периодически. Раньше складское подъемно-транспортное оборудование оснащали электродвигателями постоянного тока с возбуждением от постоянных магнитов. В настоящее время машины и автоматы комплектуют асинхронными электродвигателями переменного тока, применение которых постоянно расширяется.
е. ведущие герметичные ролики, внутри которых заключены небольшие электродвигатели и редукторы. Используются для привода конвейеров, работающих периодически. Раньше складское подъемно-транспортное оборудование оснащали электродвигателями постоянного тока с возбуждением от постоянных магнитов. В настоящее время машины и автоматы комплектуют асинхронными электродвигателями переменного тока, применение которых постоянно расширяется.
 е. ведущие герметичные ролики, внутри которых заключены небольшие электродвигатели и редукторы. Используются для привода конвейеров, работающих периодически. Раньше складское подъемно-транспортное оборудование оснащали электродвигателями постоянного тока с возбуждением от постоянных магнитов. В настоящее время машины и автоматы комплектуют асинхронными электродвигателями переменного тока, применение которых постоянно расширяется.
е. ведущие герметичные ролики, внутри которых заключены небольшие электродвигатели и редукторы. Используются для привода конвейеров, работающих периодически. Раньше складское подъемно-транспортное оборудование оснащали электродвигателями постоянного тока с возбуждением от постоянных магнитов. В настоящее время машины и автоматы комплектуют асинхронными электродвигателями переменного тока, применение которых постоянно расширяется.В чем преимущества асинхронных электродвигателей?
Асинхронные двигатели переменного тока проще и дешевле электродвигателей других типов, поэтому в настоящее время их применяют все чаще. При выборе асинхронного двигателя следует учитывать два фактора – к.п.д. преобразования энергии и тип исполнения агрегата.
К.п.д. В ряде стран законодательством установлена минимальная величина к.п.д. для электродвигателей приводов, однако многие производители изготавливают электродвигатели по более жестким стандартам Национальной ассоциации производителей электрооборудования США (NEMA). Если, выбирая электродвигатель, вы видите, что он соответствует стандарту NEMA Premium, то это гарантирует его высокий к.п.д., надежность и экономичность.
Если, выбирая электродвигатель, вы видите, что он соответствует стандарту NEMA Premium, то это гарантирует его высокий к.п.д., надежность и экономичность.
У электродвигателей обычного качества к.п.д. равен 75…85%, у агрегатов высшего качества – 85…95%. Как считают специалисты, агрегаты с высоким к.п.д. стоят намного дороже обычных, но если электродвигатель будет работать непрерывно, он окупится быстро. Кроме того, благодаря экономии энергии улучшается экологическая обстановка, на которую все больше обращают внимание в цивилизованных государствах.
Тип исполнения – важная характеристика при выборе электродвигателя. Существует пять основных исполнений асинхронных электродвигателей:
• ODP (Open drip proof) – «каплезащищенный электродвигатель открытого исполнения». Этот тип электродвигателей наиболее широко используют в промышленности. Они не оборудованы вентилятором и имеют проемы в корпусе, через которые внутрь может проникнуть грязь и влага, поэтому использовать такие электродвигатели рекомендуется только в закрытых помещениях;
• TEFC (Totally Enclosed Fan Cooled) – «закрытого типа с вентиляторным охлаждением». Эти двигатели оборудованы вентилятором, создающим поток воздуха через их корпус. Вентилятор герметизирован, и инородные частицы и жидкости не могут проникнуть в электродвигатель извне. Электродвигатели в исполнении TEFC часто применяют в конвейерах;
Эти двигатели оборудованы вентилятором, создающим поток воздуха через их корпус. Вентилятор герметизирован, и инородные частицы и жидкости не могут проникнуть в электродвигатель извне. Электродвигатели в исполнении TEFC часто применяют в конвейерах;
• TENV (Totally Enclosed Non-Ventilated Motor) – «закрытого типа без охлаждения». Эти электродвигатели также используются в подъемно-транспортном оборудовании складов, если есть внешний источник, создающий воздушный поток для охлаждения двигателя;
• TEBC (Totally Enclosed Blower-Cooled Motor) – «охлаждаемый обдувом». Эти двигатели комплектуют собственным вентилятором, но расположенным и управляемым снаружи. Электродвигатели типа TEBC обычно применяют в оборудовании высокой мощности: в подъемных кранах, лебедках и т. п. или в оборудовании, работающем с переменной скоростью, где электродвигатель иногда может работать с частотой вращения, близкой к нулю;
• EPFC (Explosion Proof Fan Cooled Motor) – «во взрывозащищенном исполнении с вентиляторным
охлаждением». Используются в условиях высокого содержания в воздухе горючих и взрывоопасных элементов, например, паров бензина, других нефтепродуктов, аммиака, угольной пыли и проч.
Используются в условиях высокого содержания в воздухе горючих и взрывоопасных элементов, например, паров бензина, других нефтепродуктов, аммиака, угольной пыли и проч.
Возможности применения любого асинхронного электродвигателя расширяются благодаря использованию электропривода с частотным регулированием (VFD). Асинхронные электродвигатели традиционной конструкции работают с постоянной частотой. Электропривод с частотным регулированием позволяет менять скорость двигателя и всей машины. В складском подъемно-транспортном оборудовании электроприводы с частотным регулированием позволяют максимально увеличивать скорость в «пиковые» периоды работы и снижать в другое время, благодаря чему экономится энергия и средства.
Серводвигатели
Эти двигатели занимают свою особую нишу – они работают в оборудовании, где требуется точное регулирование положения и скорости движений. Эти устройства специально разработаны как электродвигатели с якорем малого диаметра, но развивающие высокий крутящий момент.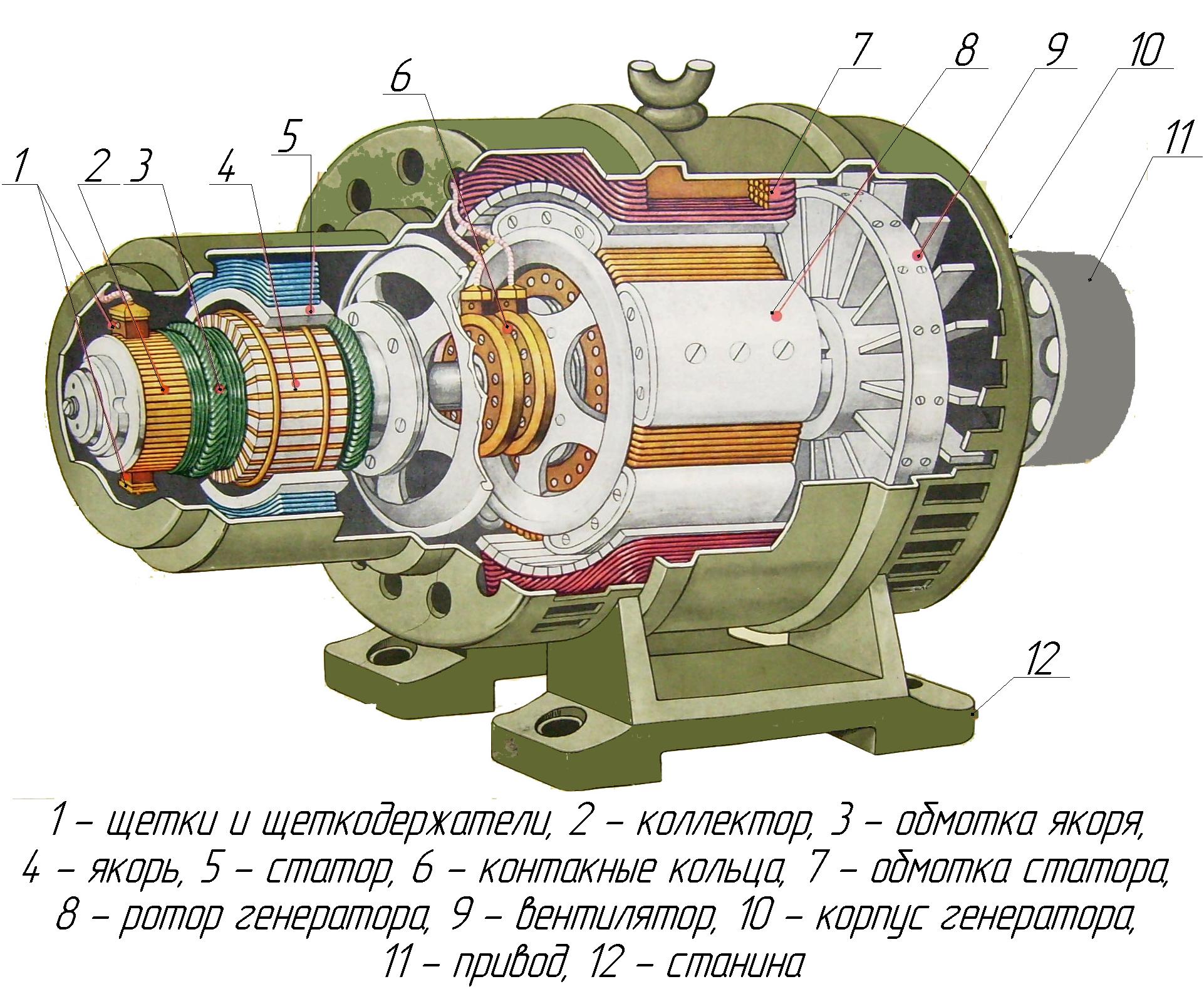
Серводвигатели оснащают также системами управления по обратной связи: по сигналам тахометра, датчиков линейных перемещений и аналого-цифрового преобразователя (АЦП). Благодаря управлению по сигналам от этих приборов увеличивается точность движений и регулирования скорости машин. Серводвигатели применяют в оборудовании и системах, где требуется высокая точность движений: в роботизированном оборудовании, штабелерах и подобных складских машинах. Электродвигатели этого типа применяют также в оборудовании и системах, где необходима большая точность синхронизации – в машинах, выполняющих установку (позиционирование) грузов на стеллажах автоматизированных складов.
Линейные асинхронные электродвигатели
Линейные асинхронные электродвигатели – новинка в отрасли складского подъемно-транспортного оборудования. Они позволяют значительно увеличить скорость движений машин при замечательной их повторяемости и точности.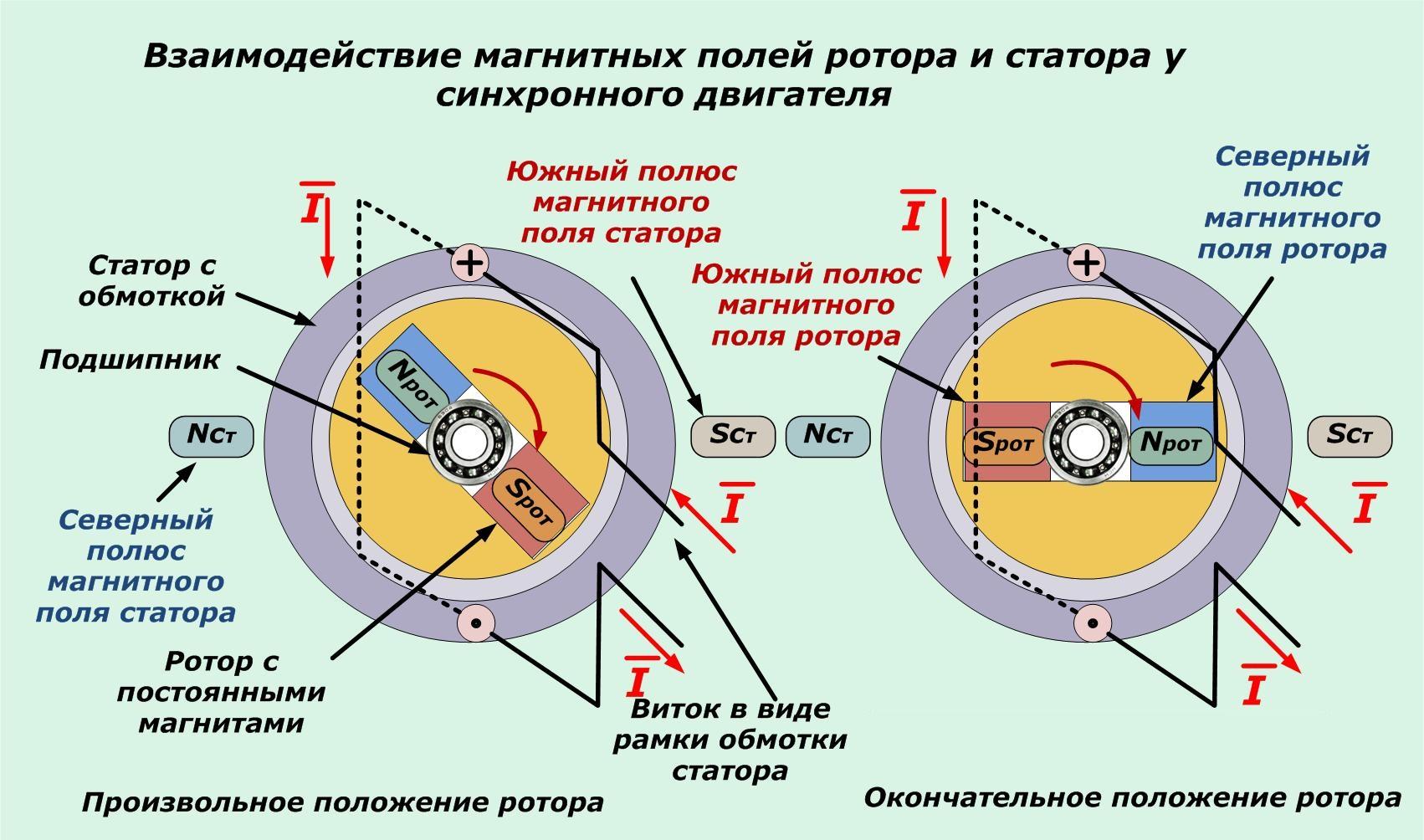 Линейный асинхронный двигатель генерирует магнитное поле, которое перемещает ползун (пластину) в двигателе. Обычно ползун прикрепляется к объекту, который должен передвигаться магнитным полем: например, в сортировочных машинах ползун электродвигателя соединен с подвижным лотком распределителя.
Линейный асинхронный двигатель генерирует магнитное поле, которое перемещает ползун (пластину) в двигателе. Обычно ползун прикрепляется к объекту, который должен передвигаться магнитным полем: например, в сортировочных машинах ползун электродвигателя соединен с подвижным лотком распределителя.В такой конструкции нет деталей, которые бы изнашивались. Линейные асинхронные электродвигатели обеспечивают точность движений до 0,0335 мм на 1 м перемещения, т. е. позволяют выполнять прецизионные работы. Насколько уникальна такая способность устройств, иллюстрирует тот факт, что толщина человеческого волоса составляет около 0,09 мм, т. е. в три раза больше! Скорость работы линейных асинхронных электродвигателей очень высокая – до 5 м/с, а следовательно, длительность рабочих циклов у них небольшая и производительность на высочайшем уровне. Скорость перемещения ползуна на разных отрезках в течение одного цикла можно менять, а можно задавать пошаговое перемещение – это очень полезное качество для некоторых автоматических машин.
Мотор-ролики
Линейные асинхронные электродвигатели – не единственная инновация в области электрических силовых агрегатов. В последнее время в конвейерах все шире стали применять мотор-ролики (MDR – Motor Driven Roller). Еще два года назад на выставке оборудования по транспортировке материалов и логистике ProMat в Чикаго лишь несколько фирм представили конвейеры с приводом от мотор-роликов, зато в экспозиции в январе 2007 г. в ассортименте почти каждой фирмы, предлагающей конвейеры, были модели с мотор-роликами.
В Соединенных Штатах конвейеры с приводом от мотор-роликов впервые использовала почтовая служба. Конструкция их проста. Внутри ведущего ролика устанавливается миниатюрный электродвигатель постоянного тока, работающий от напряжения 24 В, и редуктор. В обычных конвейерах один мотор-ролик приходится на 9 обычных роликов.
По словам специалистов, если конвейер перемещает грузы непрерывным потоком, привод от наружных электродвигателей более экономичен.![]() Конвейеры с мотор-роликами рентабельны и используются в основном в тех случаях, когда надо накапливать поступающие грузы на конвейере, а затем перемещать их дальше либо когда требуется разделять поток грузов на группы и перемещать грузы группами.
Конвейеры с мотор-роликами рентабельны и используются в основном в тех случаях, когда надо накапливать поступающие грузы на конвейере, а затем перемещать их дальше либо когда требуется разделять поток грузов на группы и перемещать грузы группами.
У мотор-роликов целый «букет» преимуществ. Уровень шума от конвейеров, оснащенных мотор-роликами, значительно ниже, чем от обычных конвейеров. Они позволяют экономить энергию: не только благодаря более высокому к.п.д. мотор-роликов, но и потому, что конвейер работает только тогда, когда надо. Еще одно преимущество – более высокий уровень систем управления мотор-роликами. В настоящее время выпускаются конвейеры с мотор-роликами, развивающие скорость до 90 м/мин, а если поток грузов уменьшился, можно снизить скорость до 30 м/мин, уменьшив таким образом износ деталей конвейера и энергопотребление. Наконец, мотор-ролик практически не нуждается в техобслуживании. Поскольку он работает лишь тогда, когда надо, его ресурс продляется на годы. Когда электродвигатель выйдет из строя, мотор-ролик заменяют другим практически без остановки конвейера.
Разница асинхронного и синхронного двигателя
Электродвигатели можно разделить на две основные категории – синхронные и асинхронные (индукционные) двигатели. Эти два вида довольно сильно отличаются друг от друга. Разница уже видна в самих названиях. Отличить агрегаты можно по выбитому на шильдике количеству оборотов (если там не указан тип мотора), у ассинхронного мотора неокруглённое число (например, 950 об/мин), у синхронного округлённое (1000 об/мин).
Есть и другие важные различия, в этой статье мы рассмотрим наиболее показательные из них: конструктивные, рабочие и ценовые.
Различия в работе и стоимости
Любой двигатель состоит из двух элементов: неподвижного и вращающегося. Статор имеет осевые прорези — пазы, на дно которых укладываются токонесущие медные или алюминиевые проводки. У электродвигателя на валу крепится ротор с обмоткой возбуждения.
Принципиальным отличием между синхронными и асинхронными двигателями являются роторы, точнее, их исполнение.
У синхронных моделей при малых мощностях они представляют собой постоянные магниты.
Переменное напряжение подаётся на обмотку статора, ротор подключается к постоянному источнику питания. Проходящий по обмотке возбуждения постоянный ток наводит магнитное поле статора. Крутящий момент создаётся из-за угла запаздывания между полями. Ротор имеет такую же скорость, как и магнитное поле статора.
Агрегаты используются на практике и как генераторы и как двигатели.
Асинхронные модели – это достаточно недорогие двигатели, которые применяются часто и всюду. Они проще в конструктивном плане, несмотря на то, что неподвижные части в принципе у всех моторов похожи.
По обмотке статора пропускается переменный электроток, который взаимодействует с роторной обмоткой. Два поля вращаются с одинаковой скоростью в одном направлении, но не могут быть равными, иначе бы не создавалась индуцированная ЭДС и, тем более крутящийся момент. Это становится причиной возникновения индуцированного тока в обмотке роторе, направление которого согласно правилу Ленца таково, что он склонен противостоять причине своего производства, т. е. скорости скольжения.
Это становится причиной возникновения индуцированного тока в обмотке роторе, направление которого согласно правилу Ленца таково, что он склонен противостоять причине своего производства, т. е. скорости скольжения.
Скорость вращения ротора не совпадает со скоростью магнитного поля, она всегда меньше. Таким образом, ротор пытается догнать скорость вращающегося магнитного поля и уменьшить относительную скорость.
Основные достоинства и недостатки
- Асинхронные агрегаты не требуют какого-либо дополнительного источника питания. Синхронным необходим дополнительный источник постоянного тока для подачи напряжения на обмотки.
- Синхронники обладают относительно невысокой чувствительностью к перепадам сетевого напряжения и стабильностью вращения вне зависимости от нагрузки.
- Индукционные двигатели не требуют наличия контактных колец, за исключением двигателей с фазным ротором, которые их имеют для плавного пуска или регулирования скорости. В синхронных двигателях больше уязвимых мест, так как используются контактные кольца со щетками. Следовательно, детали быстрее изнашиваются и контакт между ними ослабевает.
- Синхронники нуждаются во вспомогательных пусковых механизмах, так как не обладают функцией самопуска. Для индукционных электродвигателей, имеющих собственные пусковые моменты, такой механизм не требуется.
 В синхронных двигателях больше уязвимых мест, так как используются контактные кольца со щетками. Следовательно, детали быстрее изнашиваются и контакт между ними ослабевает.
В синхронных двигателях больше уязвимых мест, так как используются контактные кольца со щетками. Следовательно, детали быстрее изнашиваются и контакт между ними ослабевает.Какой агрегат лучше
В заключение нужно отметить, что говорить, якобы один мотор лучше другого, нельзя. Однако, асинхронные модели надежнее в эксплуатации, отличаются простотой конструкции. Если агрегаты не перегружать, то их длительным сроком службы пользователь может остаться довольным.
Достоинством синхронной модели является то, что можно легко установить высокий коэффициент мощности. Поэтому модель является гораздо более эффективной, но по цене она будет соответственно дороже. Машины применяются в системах с требуемой мощностью 100 кВт и более.
Синхронные и асинхронные электродвигатели: в чём разница?
В основе классификации электродвигателей на синхронный и асинхронный тип лежит конструкция мотора и особенности ротора. Так, синхронные функционируют на переменном источнике тока, а частота вращения ротора совпадает с частотой магнитного поля. Электродвигатели асинхронные иногда называют индукционными, и у них частота магнитного поля и вращений ротора не совпадают.
Так, синхронные функционируют на переменном источнике тока, а частота вращения ротора совпадает с частотой магнитного поля. Электродвигатели асинхронные иногда называют индукционными, и у них частота магнитного поля и вращений ротора не совпадают.
Особенности конструкции синхронных и асинхронных электродвигателей
В синхронных электродвигателях ключевые элементы — это индуктор и якорь. Индуктор располагается на роторе и имеет два полюса — постоянные магниты. Якорь находится на стартере, представлен одной или несколькими обмотками. Благодаря такой конструкции, синхронные двигатели могут функционировать как генераторы и как электродвигатели.
Главные конструктивные элементы асинхронных двигателей — магнитопровод и обмотка. Также в строении устройств есть ротор и статор, и другие элементы, влияющие на прочность и эффективность работы.
Отличия синхронного двигателя от асинхронного
Первое отличие — это соотношение частот вращения ротора с магнитным полем. В синхронных агрегатах эти показатели равные, а в асинхронных — отличаются. Второй тип, к слову, встречается гораздо чаще и имеет больше модификаций. Связано это с явными преимуществами асинхронных электродвигателей:
В синхронных агрегатах эти показатели равные, а в асинхронных — отличаются. Второй тип, к слову, встречается гораздо чаще и имеет больше модификаций. Связано это с явными преимуществами асинхронных электродвигателей:
- невысокая стоимость;
- простота эксплуатации;
- надёжность;
- может работать без преобразователей, на собственных ресурсах сети.
Но асинхронные двигатели не лишены и недостатков:
- имеют большой пусковой ток и маленький пусковой момент;
- у них пониженный коэффициент мощности;
- низкая управляемость.
Среди достоинств синхронных устройств выделим следующие:
- стабильность вращения независимо от нагрузок на ротор;
- не сильно чувствительны к перепадам напряжения.
Недостатками синхронных двигателей можно считать сложность конструкции и пуска в ход ротора.
Из всего вышесказанного можно сделать вывод, что асинхронные типы целесообразно использовать для двигателей, мощностью от 100 кВт. В остальных случаях проще обойтись асинхронными агрегатами.
В остальных случаях проще обойтись асинхронными агрегатами.
Асинхронный и синхронный электродвигатель в чем разница – АвтоТоп
Электродвигатели бывают двух основных типов — синхронные и асинхронные. Что представляют собой те и другие?
Что представляет собой синхронный двигатель?
К синхронным принято относить электродвигатели, которые функционируют на переменном токе и имеют ротор с частотой вращения, совпадающей с частотой оборотов магнитного поля в конструкции агрегата.
Ключевые элементы синхронного электродвигателя:
Первый элемент агрегата располагается на статоре. Индуктор размещается на роторе, который отделен от статора воздушной прослойкой. Структура якоря представлена обмоткой (одной или несколькими). Токи, которые подаются в соответствующий элемент двигателя, формируют магнитное поле, вращающееся с заданной частотой и взаимодействующее с полем индуктора. Индуктор включает 2 полюса — в виде постоянных магнитов.
Синхронный агрегат может функционировать в двух режимах:
- как собственно электродвигатель;
- как генератор.

Первый режим работы предполагает взаимодействие магнитного поля, формирующегося на якоре, и поля, которое образуется на полюсах индуктора. Синхронный двигатель в режиме генератора функционирует за счет электромагнитной индукции: в процессе вращения ротора магнитное поле, которое формируется на обмотке, по очереди взаимодействует с фазами обмотки на статоре, вследствие чего образуется электродвижущая сила.
Что представляет собой асинхронный электродвигатель?
К асинхронным принято относить электродвигатели, в которых частота вращения одного из ключевых элементов — ротора — не совпадает с частотой оборотов магнитного поля, формирующегося током, который возникает на обмотке статора. Асинхронные агрегаты иногда именуются индукционными. Это обусловлено тем, что в обмотке ротора осуществляется индуцирование тока при воздействии магнитного поля статора.
В конструкции асинхронного электродвигателя присутствуют статор и ротор, которые разделены воздушной прослойкой. Основные активные элементы агрегата:
Основные активные элементы агрегата:
- обмотка;
- магнитопровод.
Важную роль в функционировании асинхронного двигателя играют дополнительные конструктивные элементы, которые обеспечивают прочность, охлаждение и устойчивость работы агрегата.
Сравнение
Главное отличие синхронного двигателя от асинхронного заключается в соотношении величины частот вращения ротора и магнитного поля. В агрегате первого типа оба показателя одинаковые. В асинхронной машине — разные.
Можно отметить, что электродвигатели второго типа в целом более распространены, чем первые. При этом асинхронные агрегаты чаще всего представлены в разновидности, в которой инсталлирован короткозамкнутый ротор. Данные устройства имеют ряд важнейших преимуществ перед электродвигателями иных категорий. А именно:
- простота конструкции, надежность;
- относительно невысокая себестоимость производства, эксплуатации;
- способность функционирования при задействовании имеющихся ресурсов сети без подключения преобразователей.

Вместе с тем асинхронные машины с короткозамкнутым ротором обладают и рядом недостатков. А именно:
- наличие малого пускового момента;
- наличие большого пускового тока;
- пониженный коэффициент мощности;
- низкая управляемость с точки зрения регулирования скорости;
- зависимость максимальной скорости от частоты электрической сети;
- электромагнитный момент в асинхронных двигателях рассматриваемого типа характеризуется сильной чувствительностью к снижению напряжения в сети.
В свою очередь, у синхронных агрегатов также есть неоспоримые достоинства. К таковым можно отнести:
- относительно невысокую чувствительность к перепадам напряжения в сети;
- стабильность вращения вне зависимости от нагрузки на ротор.
Есть у синхронных двигателей и недостатки:
- относительная сложность конструкции;
- сложность запуска ротора в ход.
Отмеченные особенности работы синхронных и асинхронных агрегатов делают оптимальным использование первых в случае, если требуемая мощность двигателя в системе (например, как части инфраструктуры фабричной линии) должна составлять порядка 100 кВт и более. В остальных случаях задействование асинхронных машин, как правило, становится более предпочтительным.
В остальных случаях задействование асинхронных машин, как правило, становится более предпочтительным.
Рассмотрев, в чем разница между синхронным и асинхронным двигателем, отразим выводы в таблице.
Самые распространённые электродвигатели – трёхфазные машины переменного тока. Они есть двух видов – асинхронные и синхронные. В этой статье рассказывается в чём сходство и различие между машинами обоих типов и область их применения.
Принцип действия и устройство электромашин разных типов
Асинхронные и синхронные электродвигатели похожи по конструкции, но есть и отличия.
Устройство и принцип действия асинхронных электродвигателей
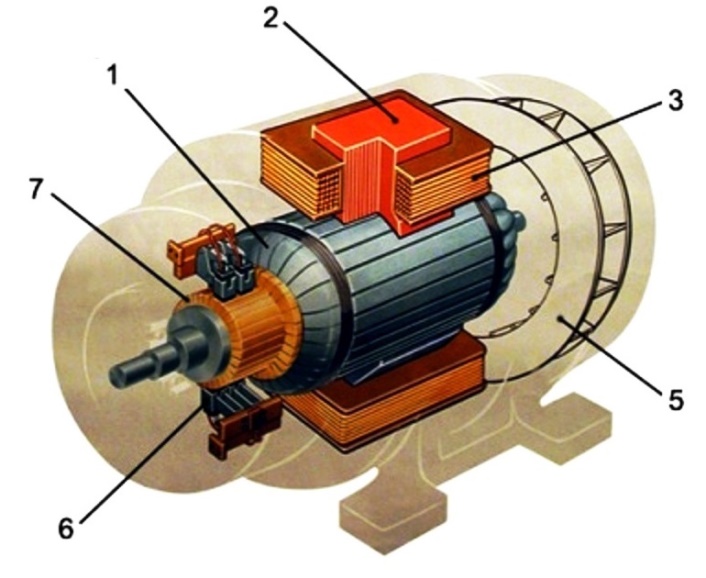
Это самые распространённые машины переменного тока. Такие электродвигатели состоят из трёх основных частей:
- Корпус с подшипниковыми щитами и лапами или фланцем.
- В корпусе находятся магнитопровод из железных пластин с обмотками. Этот магнитопровод носит название статор.
- Вал с подшипниками и магнитпроводом. Эта конструкция называется ротор. В электродвигателях с короткозамкнутым ротором в магнитопроводе находятся соединённые между собой алюминиевые стержни, эта конструкция носит название «беличья клетка». В машинах с фазным ротором вместо стержней намотаны обмотки.
 Эта конструкция называется ротор. В электродвигателях с короткозамкнутым ротором в магнитопроводе находятся соединённые между собой алюминиевые стержни, эта конструкция носит название «беличья клетка». В машинах с фазным ротором вместо стержней намотаны обмотки.
Эта конструкция называется ротор. В электродвигателях с короткозамкнутым ротором в магнитопроводе находятся соединённые между собой алюминиевые стержни, эта конструкция носит название «беличья клетка». В машинах с фазным ротором вместо стержней намотаны обмотки.В пазах статора со сдвигом 120° намотаны три обмотки. При подключении к трёхфазной сети в статоре наводится вращающееся магнитное поле. Скорость вращения называется «синхронная скорость».
Справка! В однофазных электродвигателях вращающееся поле создаётся дополнительной обмоткой или конструктивными особенностями статора.
Это поле наводит ЭДС в роторе, возникающий при этом ток создаёт своё поле, взаимодействующее с полем статора и приводящее его в движение. Скорость вращения ротора меньше синхронной скорости. Эта разница называется скольжение.
Рассчитывается скольжение по формуле S=(n1-n2)/n1*100%, где: · n1 – синхронная скорость; · n2 – скорость вращения ротора.
на скольжения в обычных электромоторах 1-8%. При увеличении нагрузки на валу двигателя скольжение и вращающий момент растут до критической величины, при достижении которой двигатель останавливается.
При увеличении нагрузки на валу двигателя скольжение и вращающий момент растут до критической величины, при достижении которой двигатель останавливается.
В электродвигателях с фазным ротором вместо беличьей клетки в пазах ротора намотаны три обмотки. Через токосъёмные кольца и щётки они подключаются к добавочным сопротивлениям. Эти сопротивления ограничивают ток и магнитное поле в роторе. Это увеличивает скольжение и уменьшает скорость двигателя.
Такие аппараты используются при тяжёлом пуске и в устройствах с регулировкой скорости, например, в мостовых кранах.
Принцип действия синхронных электродвигателей
Статор синхронной машины не отличается от асинхронной. Отличие в роторе. В отличие от асинхронного двигателя, вращение осуществляется за счёт взаимодействия вращающегося магнитного поля статора и постоянного поля ротора. Для его создания в роторе находятся электромагниты. Напряжение к катушкам подводится при помощи токосъёмных колец и графитных щёток.
Справка! В роторе синхронных машин малой мощности вместо электромагнитов установлены постоянные или просто магнитопровод имеет явновыраженные полюса. Скольжение, как в асинхронных машинах, отсутствует, и частота вращения определяется только частотой питающего напряжения.
Скольжение, как в асинхронных машинах, отсутствует, и частота вращения определяется только частотой питающего напряжения.
Запуск электродвигателей
Асинхронные электрические машины мощностью до 30-50кВт запускаются прямой подачей электроэнергии. С двигателями большой мощности и синхронными машинами дело обстоит сложнее.
Пуск асинхронных двигателей большой мощности
Для запуска таких машин используются разные способы:
- Включение добавочных сопротивлений в цепь статора. Они ограничивают пусковой ток, а после разгона закорачиваются пускателем.
- В аппаратах, предназначенных для работы в сети с фазным напряжением 660 вольт обмотки в сети 380 вольт соединены треугольником. На время пуска они переключаются в звезду.
- В электромашинах с фазным ротором для запуска в цепь ротора включаются добавочные сопротивления. После разгона они закорачиваются.
- При наличии регулировки скорости, переключением обмоток или изменением частоты, двигатель включается на минимальные обороты. После начала вращения, обороты увеличиваются.
 После начала вращения, обороты увеличиваются.
После начала вращения, обороты увеличиваются.Пуск синхронных электромашин
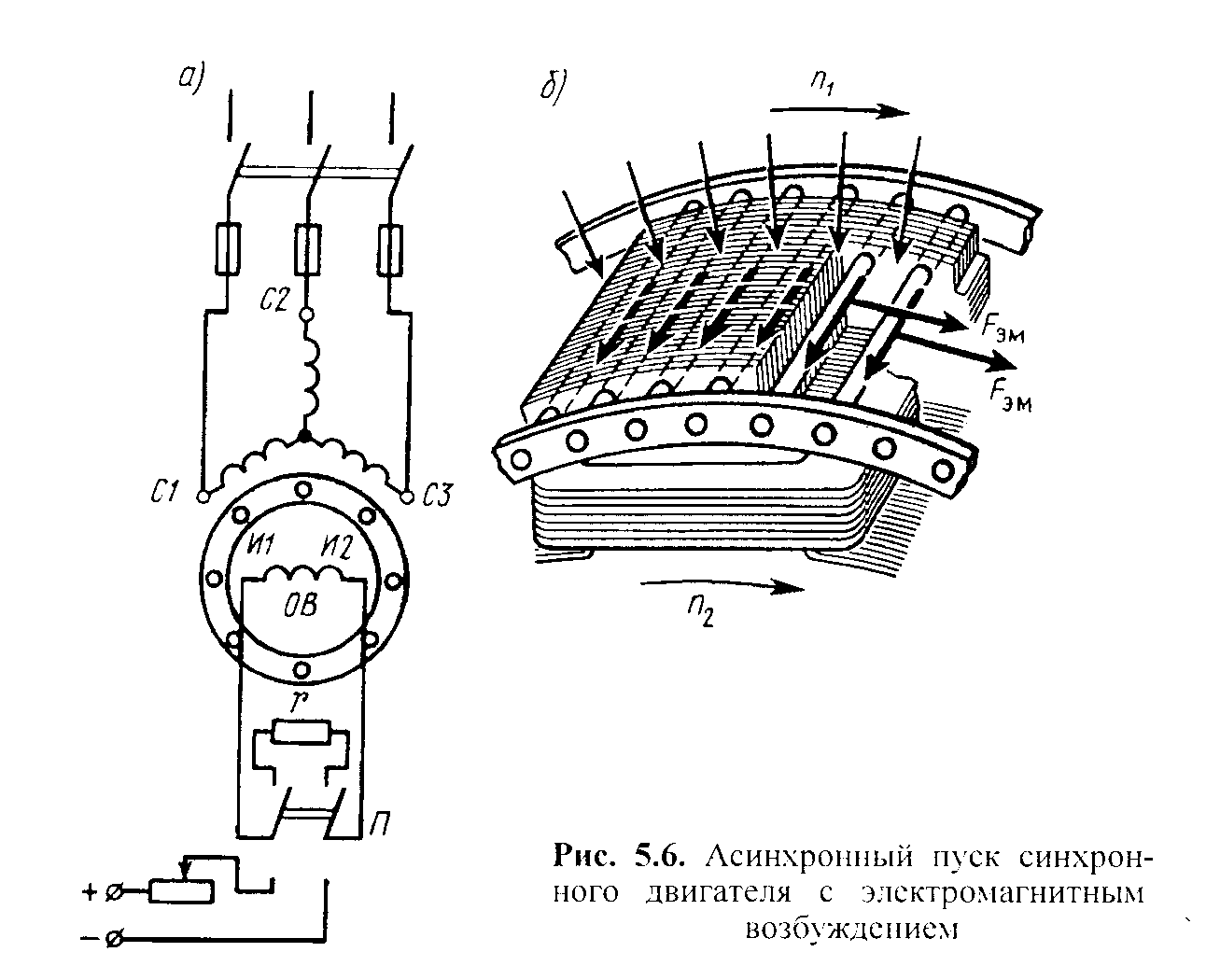
В отличие от асинхронных машин, пуск которых производится взаимодействием поля статора и обмоток или беличьей клетки ротора, синхронную машину необходимо предварительно разогнать до скорости, близкой к синхронной.
- С помощью дополнительного асинхронного двигателя. Так запускаются машины с постоянными магнитами в роторе. При достижении скорости, близкой к синхронной, асинхронхронник отключается и подаётся напряжение в статор синхронного двигателя.
- Асинхронный пуск. В роторе, кроме электромагнита, находится «беличья клетка». С её помощью аппарат разгоняется, после чего в обмотку подаётся постоянное напряжение, и двигатель начинает работать в качестве синхронного.
- Обмотки ротора закорачиваются напрямую или через добавочное сопротивление. После разгона в них подаётся постоянное напряжение.
- При помощи ТПЧ (тиристорного преобразователя частоты) частота питающего напряжения и скорость вращения плавно поднимается до номинальной. Этот способ применяется в механизмах с регулировкой скорости.
 Этот способ применяется в механизмах с регулировкой скорости.
Этот способ применяется в механизмах с регулировкой скорости.Особенности и применение разных видов электродвигателей
У каждого типа двигателей есть достоинства и недостатки по сравнению с другими. Это определяет область их применения. Применение разных типов электромашин зависит от их особенностей конструкции и принципа действия.
Достоинства и использование асинхронных электродвигателей
Такие машины имеют достоинства перед синхронными аппаратами:
- простота конструкции и низкая цена; аппараты с фазным ротором позволяют регулировать скорость вращения и осуществлять плавный пуск без использования преобразователей частоты;
- большое разнообразие мощностей – от нескольких ватт до десятков киловатт.
Кроме достоинств есть недостатки:
- падение скорости вращения при росте нагрузки;
- более низкий КПД и большие габариты, чем у синхронных аппаратов той же мощности;
- кроме активной, такие аппараты потребляют реактивную (индуктивную) мощность, что ведёт к необходимости устанавливать компенсаторы или дополнительно оплачивать реактивную электроэнергию.

Используются такие машины практически везде, где необходимо приведение в движение механизма и есть трёхфазное напряжение 380 вольт.
Классификация двигателей основывается на разных параметрах. По одному из них, различают синхронный и асинхронный двигатель. Отличия приборов, общая характеристика и принцип работы описаны в статье.
Синхронный двигатель
Этот тип двигателя способен работать одновременно и в качестве генератора, и как, собственно, двигатель. Его устройство сродни синхронному генератору. Характерной особенностью двигателя является неизменяемая частота роторного вращения от нагрузки.
Эти виды двигателей широко применяются во многих сферах, например, для электрических проводов, которым необходима постоянная скорость.
Принцип работы синхронного двигателя
В основу его функционирования положено взаимодействие вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Обычно якорь находится в статоре, а индуктор распологается в роторе. Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Принцип работы синхронного двигателя включает в себя (кратковременно) и асинхронный режим, который обычно применяют для разгона до необходимой (то есть номинальной) скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. После достижения необходимой скорости индуктор начинают питать постоянным током.
Преимущества и недостатки
Основными минусами этого вида двигателя являются:
- необходимость питания обмотки постоянным током;
- сложность запуска;
- скользящий контакт.
Большинство генераторов, где бы они ни использовались, являются синхронными. Преимуществами таких двигателей в целом являются:
Асинхронный двигатель
Данный вид устройста представляет механизм, направленный на трансформацию электрической энергии переменного тока в механическую. Из самого названия «асинхронный» можно сделать вывод, что речь идет о неодновременном процессе. И действительно, частота вращения магнитного поля статора здесь выше роторной всегда.
И действительно, частота вращения магнитного поля статора здесь выше роторной всегда.
Такое устройство состоит из статора цилиндрической формы и ротора, в зависимости от вида которого асинхронные двигатели короткозамкнутые могут быть и с фазным ротором.
Принцип действия
Работа двигателя осуществляется на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе. Вращающий момент появляется тогда, когда имеется разность частоты вращения полей.
Резюмируем теперь, чем отличается синхронный двигатель от асинхронного. Чем объясняется широкое применение одного типа и ограниченное — другого?
Синхронный и асинхронный двигатель: отличия
Отличие работы двигателей – в роторе. У синхронного типа он заключается в постоянном или электрическом магните. Благодаря притягиванию разноименных полюсов вращающееся поле статора влечет и магнитный ротор. Их скорость получается одинаковой. Отсюда и название — синхронный.
Асинхронные двигатели, в свою очередь, просты и надежны, но их недостатком является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Если рассматривать частоту вращения, то имеют и здесь синхронный и асинхронный двигатель отличия. В синхронном типе этот показатель является постоянным, в отличие от асинхронного. Поэтому первый используют там, где необходима постоянная скорость и полная управляемость, например, в насосах, вентиляторах и компрессорах.
Выявить на том или ином устройстве наличие рассматриваемых типов приборов очень просто. На асинхронном двигателе будет не круглое число оборотов (например, девятьсот тридцать в минуту), в то время как на синхронном — круглое (например, тысяча оборотов в минуту).
И те, и другие моторы управляются достаточно сложно. Синхронный тип имеет жесткую характеристику механики: при любой меняющейся нагрузке на вал мотора частота вращения будет одной и той же. При этом нагрузка, конечно, должна меняться с учетом того, чтобы двигатель способен ее выдержать, иначе это приведет к поломке механизма.
При этом нагрузка, конечно, должна меняться с учетом того, чтобы двигатель способен ее выдержать, иначе это приведет к поломке механизма.
Так устроен синхронный и асинхронный двигатель. Отличия обоих видов обуславливают сферу их использования, когда один вид справляется с задачей оптимальным образом, для другого это будет проблематичным. В то же время можно встретить и комбинированные механизмы.
Отличия асинхронных двигателей от синхронных
Применение электродвигателей в различных отраслях промышленности и быта широко распространено, в связи с экономичностью и простотой подключения и обслуживания. Для различных механизмов, применяются двигатели разной мощности и устройства. В этой статье рассмотрим, чем отличается синхронный двигатель от асинхронного, в каких механизмах они применяются и как правильно выбрать тип электрического мотора.
Асинхронные двигатели
Как и любые электрические двигатели, асинхронные моторы представляют собой устройства, которые создают крутящий момент при помощи преобразования электрического тока. Если говорить простыми словами, асинхронный двигатель – это электромотор с неравнозначной частотой вращения ротора и магнитного поля. Магнитное поле ротора в таких устройствах всегда вращается с меньшей частотой, чем поле статора.
Если говорить простыми словами, асинхронный двигатель – это электромотор с неравнозначной частотой вращения ротора и магнитного поля. Магнитное поле ротора в таких устройствах всегда вращается с меньшей частотой, чем поле статора.
Строение асинхронного двигателя в целом аналогично с синхронным. Он состоит из:
- Цилиндрического статора из металлических пластин с пазами для обмотки;
- Фазного либо короткозамкнутого ротора;
- Подвижных и неподвижных деталей корпуса, таких как вал, подшипники, вентилятор охлаждения, электрического оборудования.
Используется тип двигателя асинхронный в различных приводах как в промышленности, так и быту. Например, для обеспечения работы конвейеров, подъемных механизмов кранов и экскаваторов, деревообрабатывающих станков и других механизмов, как крупногабаритных, так и небольших бытовых.
Обслуживание и ремонт такого типа электромоторов не требует больших затрат, однако, для трансформации крутящего момента и понижения частоты вращения необходимо использовать редуктора различной сложности, часто с большим передаточным числом.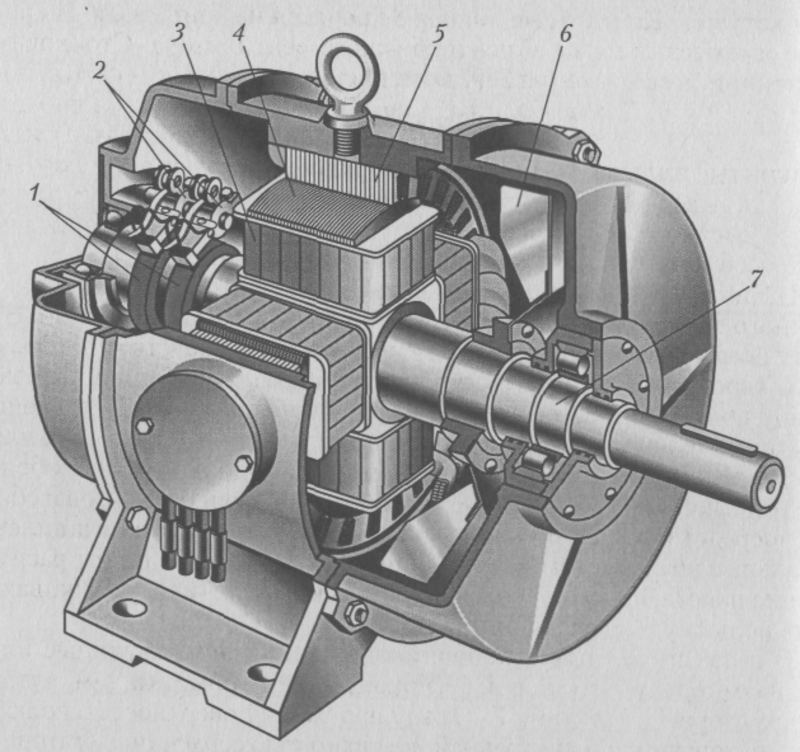
Синхронные двигатели
Основное отличие синхронного двигателя от асинхронного в том, что частота вращения магнитных полей при его работе совпадает, то есть является синхронной. Для синхронизации частот вращения используется дополнительный источник постоянного питания, что делает конструкцию синхронного электродвигателя сложнее и частично ограничивает сферу применения такого вида машин. Кроме того, работа такого типа двигателя возможна только с использованием частотного преобразователя.
В сфере применения, электродвигатели синхронные – это промышленные моторы большой мощности, которые используются в различных промышленных устройствах и оборудовании, где необходима повышенная мощность и возникают перегрузки.
Важной особенностью такого типа электромоторов является то, что при работе с перегрузкой устройство отдает часть реактивной мощности в сеть, что способствует повышению мощности, компенсирует падение мощности.
Синхронные двигатели бывают также таких типов:
- Гистерезисные двигатели используются в точных механизмах для создания вращения. Например, в звукозаписи, медицинском оборудовании, машиностроении
- Шаговые электродвигатели применяются в точных приборах и механизмах, таких как, например, станки с числовым программным обеспечением.
 Например, в звукозаписи, медицинском оборудовании, машиностроении
Например, в звукозаписи, медицинском оборудовании, машиностроении
Преимущества и недостатки синхронных и асинхронных электродвигателей
Что бы определить, какой двигатель лучше синхронный или асинхронный, необходимо рассмотреть сферу применения этих устройств.
Асинхронные двигатели дешевле в производстве и не требуют дополнительного питания и устройства для запуска, в отличии от синхронных, поэтому, их использование более распространено. Кроме того, подключение и обслуживание таких двигателей также стоит дешевле, как и их производство.
Синхронные двигатели, кроме повышенной мощности, обладают еще одним важным преимуществом – возможностью генерации низкой частоты вращения без использования дополнительных передач в редукторах. При этом, мощность на выходном валу остается неизменной. Синхронный двигатель имеет повышенный коэффициент полезного действия, более полно трансформируя электрическую энергию в крутящий момент.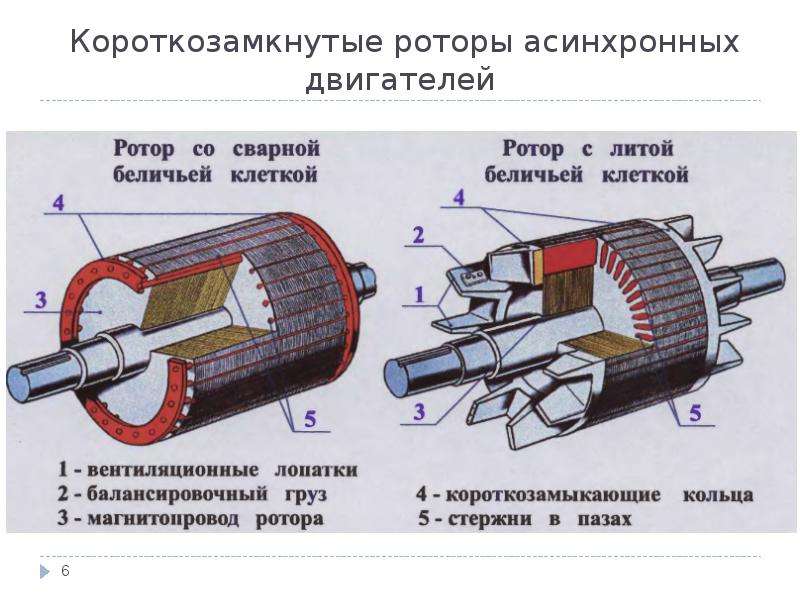
Однако, синхронные двигатели имеют и недостатки. Кроме того, что требуется дополнительное питание и оборудование запуска, в таком типе электродвигателей происходит быстрый износ подвижных токосъемных деталей, таких как щётки и контактные кольца. Для замены изношенного оборудования требуются средства, что еще более увеличивает стоимость использования синхронных моторов.
Кроме того, настройка и обслуживание синхронных двигателей имеет ряд особенностей и требует более глубоких знаний технических особенностей.
Какой тип двигателя выбрать
При выборе типа электрического двигателя следует учитывать такие факторы:
- Сферу применения и оборудование, которое приводится в движение электродвигателем;
- Стоимость оборудования и его обслуживания;
- Тип преобразующего редуктора, применяемого для понижения скорости вращения;
- Тип питания и электрической сети.
Учитывая эти факторы и принимая во внимание расчет механизма, можно подобрать тип двигателя, который будет обеспечивать бесперебойную работу устройства, максимально экономить электроэнергию и обеспечивать необходимую мощность.
При использовании любого вида электрических двигателей стоит помнить, что срок их службы зависит от соблюдение технического регламента при подключении, настройке и последующему обслуживанию такого оборудования. При нарушении технических требований электродвигатель выйдет из строя, несмотря на его преимущества и надежность.
Синхронные и асинхронные генераторы. Отличия и особенности.
Синхронные и асинхронные генераторы. Отличия и особенности
Эта статья будет посвящена такому вопросу как «различия между синхронными и асинхронными генераторами». Казалось бы вопрос довольно простой и не требует детального разбирательства, можно открыть учебник физики и все прочесть, да и в интернете должно быть много информации. Все верно, но учебник физики есть не у всякого, а в интернете слишком много противоречивой информации.
Различные сайты размещают у себя противоречивые определения одного и того же.
В этой статье мы дадим точное, максимально полное и понятное описание.
Про то, что такое электростанция, генератор и двигатель Вы уже прочти или же можете прочесть в статье на нашем сайте, которая так и называется: «Что такое генератор/электростанция».
Первое определение синхронного генератора будет техническим, а второе более практическим. Первое поможет понять устройство и принцип его работы, а второе применить знания и точнее определиться с типом генератора, который Вам необходим.
Синхронный генератор
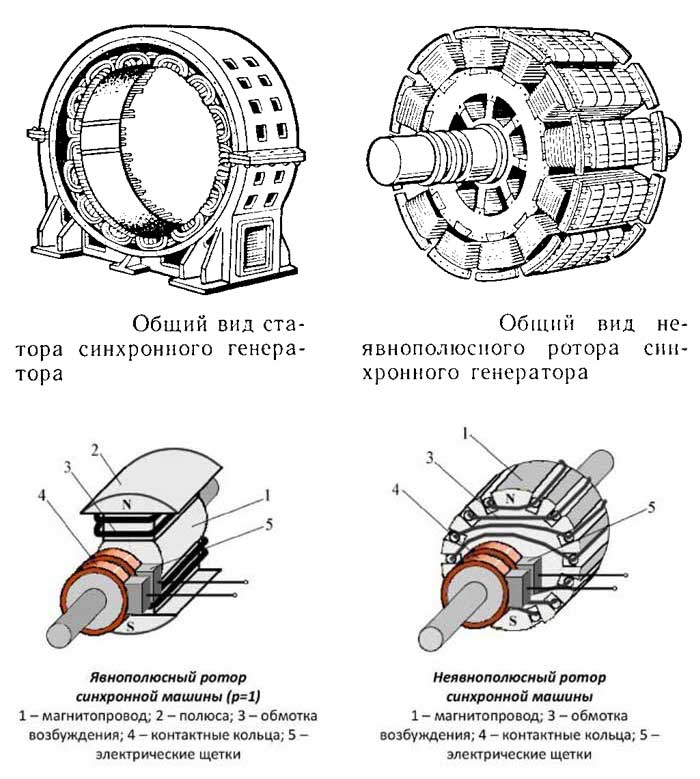
I. Синхронный генератор – механизм, работающий в режиме генерации энергии, в котором частота вращения магнитного поля стартора равна частоте вращения ротора. Ротор с магнитными полюсами создает вращающееся магнитное поле, которое пересекая обмотку стартера, наводит в ней ЭДС.
В синхронном генераторе ротор выполнен в виде постоянного магнита или электромагнита. Число полюсов ротора может быть два, четыре и т.д., но ОБЯЗАТЕЛЬНО кратно двум. В бытовых электростанция чаще всего применяют ротор с двумя полюсами. Именно этим объясняется частота вращения двигателя электростанции – 3000 об/мин.
Число полюсов ротора может быть два, четыре и т.д., но ОБЯЗАТЕЛЬНО кратно двум. В бытовых электростанция чаще всего применяют ротор с двумя полюсами. Именно этим объясняется частота вращения двигателя электростанции – 3000 об/мин.
При старте электростанции, ротор создает слабое магнитное поле, но с ростом оборотов, увеличивается и ЭДС в обмотке возбуждения. Напряжение с этой обмотки через блок автоматической регулировки (AVR) поступает на ротор, контролируя выходное напряжение за счет изменения магнитного поля. Рассмотрим на примере: Подключение индуктивной нагрузки размагничивает генератор и снижает напряжение, а подключение емкостной нагрузки вызывает подмагничивание генератора и рост напряжения. Такое явление носит название «реакция якоря».
Обеспечение стабильного выходного напряжения происходит за счет изменения магнитного поля ротора путем регулирования тока в его обмотке. Это происходит за счет использования блока автоматической регулировки (AVR). Основным достоинством синхронного генератора является высокая стабильность выходного напряжения. Несовершенство синхронных генераторов – это возможность перегрузки по току, так как при превышении допустимой нагрузки, регулятор может слишком сильно поднять то к в обмотке ротора. Также синхронные генераторы требует периодического обслуживания, пусть и не очень частого.
Основным достоинством синхронного генератора является высокая стабильность выходного напряжения. Несовершенство синхронных генераторов – это возможность перегрузки по току, так как при превышении допустимой нагрузки, регулятор может слишком сильно поднять то к в обмотке ротора. Также синхронные генераторы требует периодического обслуживания, пусть и не очень частого.
II. Синхронный генератор – тип генератора, который способен кратковременно выдавать ток в 3-4 раза выше номинального. Также синхронные генераторы оптимальны для подключения оборудования с высокими стартовыми токами. Это электродвигатели, насосы, компрессоры, дисковые пилы и прочий электроинструмент. Для подключения сварочных аппаратов тоже желательно использовать электростанции с синхронными генераторами.
Асинхронный генератор
I.Асинхронный генератор – асинхронный двигатель, работающий в режиме торможения. В этом случае ротор вращается в одном направлении с магнитным полем стартера, но с опережением.
Различают короткозамкнутые и фазные роторы в зависимости от типа обмотки. Вращающееся магнитное поле, создаваемое вспомогательной обмоткой стартора, индуцирует на роторе магнитное поле, которое вращаясь вместе с ротором, наводит ЭДС в рабочей обмотке стартора, тоже принцип, что в синхронном генераторе. Вращающееся магнитное поле остается всегда неизменным и не поддается регулировке, поэтому частота и напряжение на выходе генератора зависят от частоты оборотов ротора, которые в свою очередь, зависят от стабильности работы двигателя электростанции.
Генераторы асинхронного типа имеют малую чувствительность к короткому замыканию и высокую степень защиты от внешних воздействий. О классах защиты мы поговорим немного позднее. Цена генераторов такого типа ниже, что является еще одним плюсом.
Асинхронные генераторы менее распространены из-за ряда недостатков: такой генератор потребляет намагничивающий ток значительной силы, поэтому для его работы требуются конденсаторы; ненадежность работы в экстремальных условиях; зависимость напряжения и частоты тока от устойчивости работы двигателя.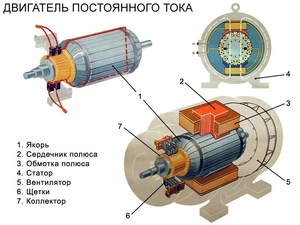
II. Асинхронный генератор – генератор, который можно использовать только с приборами не имеющими высоких стартовых токов и устойчивыми к незначительным перепадам напряжения. Такие генераторы стоят дешевле чем синхронные и имеют более высокий класс защиты от внешних условий.
Классы защиты генераторов
Этот параметр обозначается буквами (IP) и двумя цифрами, которые и несут смысловую нагрузку. Разберемся поподробнее.
Синхронные генераторы сейчас чаще всего соответствуют классу IP 23, тогда как асинхронные – IP 54. Хотя в последнее время все больше производителей начинают выводить на рынок синхронные генераторы с таким же высоким классом защиты (IP 54) как и у асинхронных генераторов. Такая разница в классах защиты объясняется конструктивными особенностями генераторов обоих типов. На синхронном генераторе находятся катушки индуктивности, а асинхронный генератор имеет более простую конструкцию (еще говорят «закрытую»), поскольку его ротор напоминает маховик.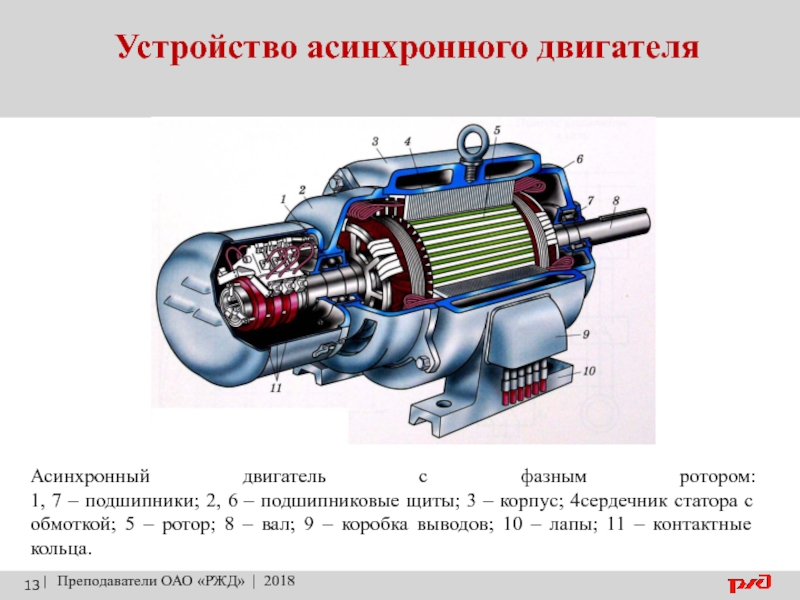
Расшифровка:
• 0-защита отсутствует
• 1-защита от предметов > 50 мм
• 2-защита от предметов > 12 мм
• 3-защита от предметов > 2.5 мм
• 4-защита от предметов > 1 мм
• 5-защита от пыли
Вторая цифра означает:
• 0-защита отсутствует
• 1-защита от вертикально падающих капель воды
• 2-защита от капель воды, падающих под углом 15 градусов к вертикали
• 3-защита от брызг воды, падающих под углом 60 градусов к вертикали
• 4-защита от водяной пыли, распыленной со всех сторон
• 5-защита от струй воды со всех сторон
Надеемся, что после прочтения этой статьи Вам станет немного проще выбрать генератор, который подойдет Вам больше всего.
Специалисты интернет магазина
генераторов и электростанций «Мега-ватт»
Статор (англ. stator, от лат. sto — стою) электромашины, неподвижная часть электрической машины, выполняющая функции магнитопровода и несущей конструкции. Стартор состоит из сердечника и станины.
stator, от лат. sto — стою) электромашины, неподвижная часть электрической машины, выполняющая функции магнитопровода и несущей конструкции. Стартор состоит из сердечника и станины.
Ротор в технике [от лат. roto — вращаю (сь)], 1) вращаюшаяся часть двигателей и рабочих машин, на которой расположены органы, получающие энергию от рабочего тела
[3] Электродвижущая сила (ЭДС) — физическая величина, характеризующая работу сторонних (непотенциальных) сил в источниках постоянного или переменного тока. В замкнутом проводящем контуре ЭДС равна работе этих сил по перемещению единичного положительного заряда вдоль контура.
ЭДС можно выразить через напряжённость электрического поля сторонних сил (Eex). В замкнутом контуре (L) тогда ЭДС будет равна:
, где dl — элемент длины контура.
ЭДС, так же как и напряжение, измеряется в вольтах.
При вращении ротора его магнитное поле наводит в трёхфазной обмотке статора переменную эдс, частота которой f = р.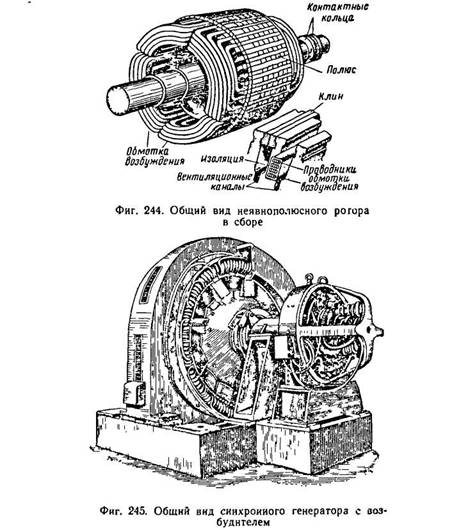 п, где р и n — соответственно число пар полюсов и частота вращения ротора. Быстроходные С. г. (турбогенераторы) имеют малое число пар полюсов (р = 1, 2), а в тихоходных (гидрогенераторах) р достигает нескольких десятков. Величина эдс регулируется изменением тока в обмотке ротора.
п, где р и n — соответственно число пар полюсов и частота вращения ротора. Быстроходные С. г. (турбогенераторы) имеют малое число пар полюсов (р = 1, 2), а в тихоходных (гидрогенераторах) р достигает нескольких десятков. Величина эдс регулируется изменением тока в обмотке ротора.
Щеточный узел требует замены или ремонта.
Чем отличается синхронный двигатель от асинхронного
Промышленные электродвигатели классифицируются по разным параметрам. Одной из определяющих характеристик является принцип работы. Так, различают синхронный и асинхронный двигатели. В чем же разница между ними?
Синхронный двигатель способен работать, одновременно совмещая функции двигателя и генератора. Его характерной особенностью является неизменяемая частота роторного вращения от нагрузки. Синхронные двигатели применяются в различных сферах.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Как правило, якорь находится в статоре, а индуктор располагается в роторе. Для моторов повышенной мощности устанавливаются электрические магниты для полюсов, а для маломощных — постоянные. На короткое время принцип работы синхронного двигателя включает в себя и асинхронный режим, используемый для разгона до номинальной скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. По достижении необходимой скорости индуктор начинают питать постоянным током.
Как правило, якорь находится в статоре, а индуктор располагается в роторе. Для моторов повышенной мощности устанавливаются электрические магниты для полюсов, а для маломощных — постоянные. На короткое время принцип работы синхронного двигателя включает в себя и асинхронный режим, используемый для разгона до номинальной скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. По достижении необходимой скорости индуктор начинают питать постоянным током.
К недостаткам синхронных двигателей относят необходимость питания обмотки постоянным током, сложность запуска и скользящий контакт. Однако, несмотря на это, большинство генераторов, применяемых в различных промышленных областях, являются синхронными. К преимуществам таких двигателей относят высокую надежность, большой коэффициент полезного действия, простоту обслуживания.
Асинхронный двигатель — это механизм, трансформирующий электрическую энергию переменного тока в механическую. Частота вращения магнитного поля статора у таких устройств выше роторной. Асинхронный двигатель состоит из статора цилиндрической формы и ротора. Он работает на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе. Вращающий момент появляется тогда, когда имеется разность частоты вращения полей.
Частота вращения магнитного поля статора у таких устройств выше роторной. Асинхронный двигатель состоит из статора цилиндрической формы и ротора. Он работает на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе. Вращающий момент появляется тогда, когда имеется разность частоты вращения полей.
Таким образом, ключевое отличие синхронного и асинхронного двигателей — в роторе. У синхронного типа он заключается в постоянном или электрическом магните, асинхронные двигатели короткозамкнутые.
Основным недостатком асинхронных двигателей является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя приходится изменять расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
В синхронном двигателе частота вращения является постоянной, в отличие от асинхронного. Поэтому первый применяют в областях, где необходима постоянная скорость и полная управляемость, к примеру, в насосах, вентиляторах и компрессорах.
Выводы:
- Синхронный двигатель способен работать, одновременно совмещая функции двигателя и генератора.
- Синхронные двигатели являются более современными, чем асинхронные.
- Синхронные двигатели имеют более высокий КПД, чем асинхронные.
- Ключевое отличие синхронного и асинхронного двигателей — в роторе.
- В синхронном двигателе частота вращения является постоянной, в отличие от асинхронного.
- Асинхронные двигатели труднее регулируются.
Асинхронный двигатель
и синхронный: в чем разница?
Все вращающиеся электродвигатели переменного и постоянного тока работают за счет взаимодействия двух магнитных полей. Один из них стационарный и (обычно) связан с внешним кожухом двигателя. Другой вращается и связан с вращающимся якорем двигателя (также называемым его ротором). Вращение вызвано взаимодействием двух полей.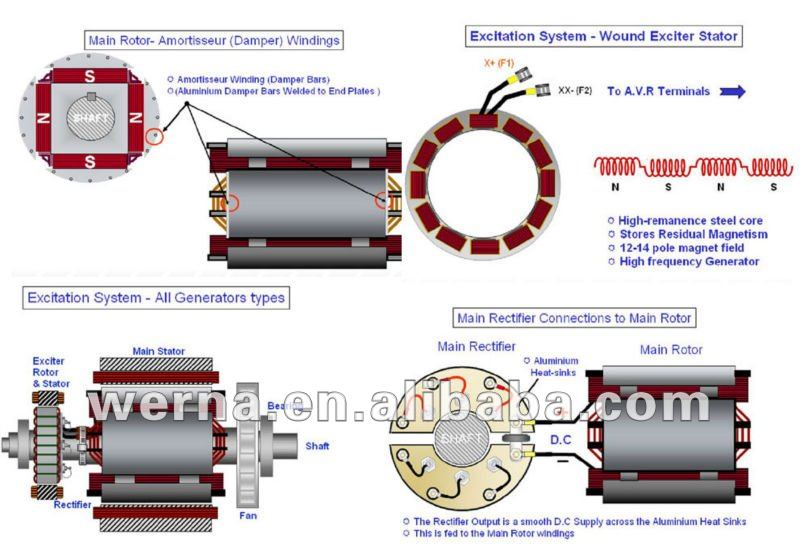
В простом двигателе постоянного тока есть вращающееся магнитное поле, полярность которого меняется каждые пол-оборота с помощью комбинации щеточного коммутатора.Щетки — в основном проводящие углеродные стержни, которые касаются проводов на роторе при их вращении — также служат для подачи электрического тока во вращающийся якорь. В бесщеточном двигателе постоянного тока ситуация несколько иная. Вращающееся поле все еще меняется на противоположное, но посредством коммутации, которая происходит в электронном виде.
Асинхронный двигатель обладает уникальным качеством, заключающимся в отсутствии электрического соединения между неподвижной и вращающейся обмотками. Сетевой переменный ток подается на клеммы двигателя и питает неподвижные обмотки.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронное название возникает из-за разницы между скоростью вращения поля статора и несколько меньшей скоростью ротора.
Ротор с короткозамкнутым ротором от асинхронного двигателя. Этот пример взят из небольшого вентилятора.
Этот пример взят из небольшого вентилятора.Большинство современных асинхронных двигателей имеют ротор в виде беличьей клетки. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе.Твердый сердечник ротора состоит из листов электротехнической стали.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора. Это асинхронные двигатели с фазным ротором. Смысл конструкции состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо.Когда ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом, электрически они становятся такими же, как ротор с короткозамкнутым ротором.
Стационарная часть обмоток асинхронного двигателя (статор) подключается к источнику переменного тока. Подача напряжения на статор вызывает прохождение переменного тока в обмотках статора. Прохождение тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора.Но положение полюса статора меняется при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс в роторе пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот. Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора, потому что поле ротора всегда на некоторую величину отстает от поля статора. Это отставание заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Это отставание заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит главным образом от нагрузки двигателя, но также зависит от сопротивления цепи ротора и напряженности поля, создаваемого магнитным потоком статора. Скольжение в двигателе конструкции B составляет от 0,5% до 5%.
Когда двигатель остановлен, обмотки ротора и статора фактически являются первичной и вторичной обмотками трансформатора.Когда к статору изначально подается переменный ток, ротор не движется. Таким образом, индуцированное в роторе напряжение имеет ту же частоту, что и на статоре. Когда ротор начинает вращаться, частота индуцированного в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение s связывает эти два значения через f r = sf. Здесь s выражается в виде десятичной дроби.
Поскольку асинхронный двигатель не имеет щеток, коллектора или подобных движущихся частей, его производство и обслуживание дешевле, чем другие типы двигателей.
Для сравнения, рассмотрим синхронный двигатель. Здесь ротор вращается с той же скоростью, то есть синхронно, с магнитным полем статора. Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе. Магнитное поле статора вращается синхронно с частотой сети.
Обмотка ротора синхронного двигателя может получать ток различными способами, но обычно не за счет индукции (за исключением некоторых конструкций, только для обеспечения пускового момента).Тот факт, что ротор вращается синхронно с частотой сети переменного тока, делает синхронный двигатель полезным для управления высокоточными часами.
Следует подчеркнуть, что ротор синхронного двигателя переменного тока вращается синхронно с целым числом циклов переменного тока. Это не то же самое, что сказать, что он вращается со скоростью, равной частоте сети. Частота вращения ротора двигателя, то есть синхронная скорость N, составляет:
.
N = 120 футов / P = 60 кадров
Где f — частота сети переменного тока в Гц, P — количество полюсов (на фазу), а p — количество пар полюсов на фазу.
Соответственно, чем больше полюсов, тем медленнее вращается синхронный двигатель. При равной мощности дороже построить более медленный двигатель. При 60 Гц:
- Двухполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 3600 об / мин.
- Четырехполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1800 об / мин.
- Шестиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1200 об / мин.
- Восьмиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 900 об / мин
- Десятиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 720 об / мин.
- Двенадцатиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 600 об / мин.
 Синхронные двигатели переменного тока
Синхронные двигатели переменного токамалой мощности полезны там, где требуется точное время. Синхронные двигатели переменного тока высокой мощности, хотя и более дорогие, чем трехфазные асинхронные двигатели, обладают двумя дополнительными качествами. Несмотря на более высокую начальную стоимость, они могут окупиться в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно, они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Существует несколько различных типов синхронных двигателей переменного тока. Обычно их классифицируют по способам создания магнитного поля. Двигатели с независимым возбуждением имеют магнитные полюса, питаемые от внешнего источника. Напротив, магнитные полюса возбуждаются самим двигателем в самовозбуждаемой (также иногда называемой невозбужденной и непосредственно возбужденной) машине. Типы без возбуждения включают реактивные двигатели, двигатели с гистерезисом и двигатели с постоянными магнитами. Кроме того, существуют двигатели с возбуждением постоянным током.
Типы без возбуждения включают реактивные двигатели, двигатели с гистерезисом и двигатели с постоянными магнитами. Кроме того, существуют двигатели с возбуждением постоянным током.
Синхронные двигатели без возбуждения имеют стальные роторы. В процессе работы ротор намагничивается необходимыми магнитными полюсами аналогично асинхронному двигателю. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью до тех пор, пока требуемый крутящий момент низкий.
В реактивном электродвигателе ротор имеет выступающие полюса, напоминающие отдельные зубцы. Ротора меньше, чем полюсов статора, что препятствует совмещению полюсов статора и ротора, и в этом случае вращения не будет. Реактивные двигатели не запускаются автоматически. По этой причине в ротор часто встраивают специальные обмотки (так называемые обмотки с короткозамкнутым ротором), поэтому реактивный двигатель запускается как асинхронный.
По этой причине в ротор часто встраивают специальные обмотки (так называемые обмотки с короткозамкнутым ротором), поэтому реактивный двигатель запускается как асинхронный.
Гистерезисный двигатель использует широкую петлю гистерезиса в высококоэрцитивном роторе из кобальтовой стали.Из-за гистерезиса фаза намагничивания в роторе отстает от фазы вращающегося магнитного поля статора. Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются, обеспечивая непрерывное вращение. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Синхронный двигатель переменного тока с постоянными магнитами имеет постоянные магниты, встроенные в ротор. Последние лифты приводятся в действие этими двигателями, и коробка передач не требуется.
Пример двигателя с постоянными магнитами с электронной коммутацией, в данном случае от небольшого воздушного вентилятора.Этот стиль называется аутраннером, потому что ротор находится вне статора и встроен в лопасти вентилятора. Это четырехполюсный двигатель, о чем свидетельствуют четыре обмотки статора (внизу). Также виден датчик Холла, который обеспечивает часть электронной коммутации.
Это четырехполюсный двигатель, о чем свидетельствуют четыре обмотки статора (внизу). Также виден датчик Холла, который обеспечивает часть электронной коммутации.Синхронный двигатель с прямым возбуждением может называться различными именами, включая ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом. Ротор содержит постоянные магниты.Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Пример того, как на катушки двигателя постоянного тока подается питание в последовательности, которая приводит в движение ротор. Компьютер контролирует последовательное включение питания обмоток статора в нужное время с помощью твердотельных переключателей. Питание подается на катушки, намотанные на зубья статора, и если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере, некоторый магнитный поток пересекает зазор под углом, не перпендикулярным поверхностям зуба. В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере, некоторый магнитный поток пересекает зазор под углом, не перпендикулярным поверхностям зуба. В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя — это реактивный двигатель с регулируемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов.Зубы магнитопроницаемы, а окружающие их области слабо проницаемы из-за прорезанных в них пазов.
В отличие от асинхронных двигателей, здесь нет стержней ротора и, следовательно, в роторе отсутствует ток, создающий крутящий момент. Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, в которых роторы имеют проводники.
Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора.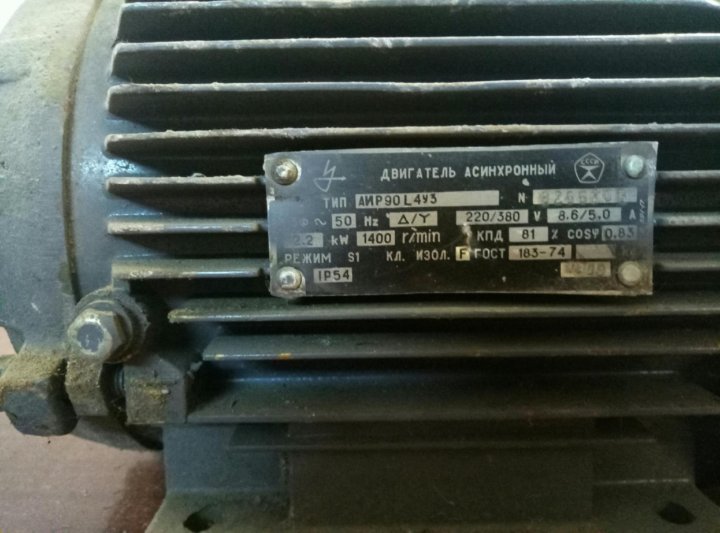 Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен способу регулирования скорости с помощью тока якоря в традиционном щеточном двигателе постоянного тока.
Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен способу регулирования скорости с помощью тока якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения числа оборотов двигателя.
И, наконец, синхронный двигатель переменного тока с возбуждением постоянным током. Для создания магнитного поля требуется выпрямленный источник питания. Эти двигатели обычно имеют мощность, превышающую одну лошадиную силу.
Разница между синхронным двигателем и асинхронным двигателем
Двигатели переменного тока можно разделить на две основные категории — (i) синхронный двигатель и (ii) асинхронный двигатель . Асинхронный двигатель обычно называют асинхронным двигателем. Оба типа сильно отличаются друг от друга.Основные различия между синхронным двигателем и асинхронным двигателем обсуждаются ниже.
Асинхронный двигатель обычно называют асинхронным двигателем. Оба типа сильно отличаются друг от друга.Основные различия между синхронным двигателем и асинхронным двигателем обсуждаются ниже. Конструктивная разница
- Синхронный двигатель : Статор имеет осевые пазы, которые состоят из обмотки статора, намотанной на определенное количество полюсов. Обычно используется ротор с явнополюсным ротором, на котором установлена обмотка ротора. Обмотка ротора запитана постоянным током с помощью контактных колец. Также можно использовать ротор с постоянными магнитами.
Синхронный двигатель - Асинхронный двигатель : Обмотка статора аналогична обмотке синхронного двигателя.Он накручивается на определенное количество полюсов. Можно использовать ротор с короткозамкнутым ротором или ротор с обмоткой. В роторе с короткозамкнутым ротором стержни ротора постоянно замкнуты накоротко с концевыми кольцами. В роторе с намоткой обмотки также постоянно закорочены, поэтому контактные кольца не требуются.
Асинхронный двигатель
 В роторе с намоткой обмотки также постоянно закорочены, поэтому контактные кольца не требуются.
В роторе с намоткой обмотки также постоянно закорочены, поэтому контактные кольца не требуются. Разница в рабочем
- Синхронный двигатель : Полюса статора вращаются с синхронной скоростью (Нс) при питании от трехфазного источника питания.Ротор питается от источника постоянного тока. Во время пуска ротор необходимо вращать со скоростью, близкой к синхронной. В этом случае полюса ротора магнитно соединяются с вращающимися полюсами статора, и, таким образом, ротор начинает вращаться с синхронной скоростью.
- Синхронный двигатель всегда работает со скоростью, равной его синхронной скорости.
т.е. фактическая скорость = синхронная скорость
или N = Ns = 120f / P - Подробнее о работе синхронного двигателя здесь.
- Асинхронный двигатель : Когда на статор подается двух- или трехфазное питание переменного тока, создается вращающееся магнитное поле (RMF). Относительная скорость между вращающимся магнитным полем статора и ротором вызовет индуцированный ток в проводниках ротора. Ток ротора вызывает поток ротора. Согласно закону Ленца, направление этого индуцированного тока таково, что он будет иметь тенденцию противодействовать причине его образования, то есть относительной скорости между RMF статора и ротором.Таким образом, ротор будет пытаться догнать RMF и снизить относительную скорость.
 Относительная скорость между вращающимся магнитным полем статора и ротором вызовет индуцированный ток в проводниках ротора. Ток ротора вызывает поток ротора. Согласно закону Ленца, направление этого индуцированного тока таково, что он будет иметь тенденцию противодействовать причине его образования, то есть относительной скорости между RMF статора и ротором.Таким образом, ротор будет пытаться догнать RMF и снизить относительную скорость.
Относительная скорость между вращающимся магнитным полем статора и ротором вызовет индуцированный ток в проводниках ротора. Ток ротора вызывает поток ротора. Согласно закону Ленца, направление этого индуцированного тока таково, что он будет иметь тенденцию противодействовать причине его образования, то есть относительной скорости между RMF статора и ротором.Таким образом, ротор будет пытаться догнать RMF и снизить относительную скорость.Другие отличия
- Синхронным двигателям требуется дополнительный источник постоянного тока для питания обмотки ротора. Асинхронные двигатели не требуют дополнительного источника питания.
- Контактные кольца и щетки требуются в синхронных двигателях, но не в асинхронных двигателях (за исключением асинхронного двигателя с обмоткой, в котором двигатели с контактным кольцом используются для добавления внешнего сопротивления обмотке ротора).
- Синхронным двигателям требуется дополнительный пусковой механизм для первоначального вращения ротора, близкого к синхронной скорости. В асинхронных двигателях пусковой механизм не требуется.
- Коэффициент мощности синхронного двигателя может быть отрегулирован на отстающий, единичный или опережающий за счет изменения возбуждения, тогда как асинхронный двигатель всегда работает с отстающим коэффициентом мощности.
- Синхронные двигатели обычно более эффективны, чем асинхронные.
- Синхронные двигатели дороже.
 В асинхронных двигателях пусковой механизм не требуется.
В асинхронных двигателях пусковой механизм не требуется.▷ Синхронные и асинхронные двигатели — где их использовать?
Многие люди часто путаются с терминами «синхронные» и «асинхронные двигатели» и с их областями применения. Именно поэтому один из новейших членов сообщества электротехники написал эту статью. Проверьте это ниже:
Следующая информация касается общих принципов работы синхронных и асинхронных двигателей, их преимуществ, а также где они обычно используются и что можно достичь с помощью каждого из этих двигателей.
Давайте сначала сконцентрируемся на их принципах работы…
Синхронные и асинхронные двигатели — принципы работы
Синхронные двигатели
Это типичный электродвигатель переменного тока, способный развивать синхронную скорость. В этих двигателях и статор, и ротор вращаются с одинаковой скоростью, что обеспечивает синхронизацию. Основной принцип работы заключается в том, что когда двигатель подключен к сети, электричество течет в обмотки статора, создавая вращающееся электромагнитное поле.Это, в свою очередь, индуцируется на обмотках ротора, который затем начинает вращаться.
Требуется внешний источник постоянного тока, чтобы синхронизировать направление и положение вращения ротора с направлением вращения статора. В результате такой блокировки двигатель либо должен работать синхронно, либо не вращаться совсем.
Асинхронные двигатели
Принцип работы асинхронных двигателей почти такой же, как и у синхронных двигателей, за исключением того, что к ним не подключен внешний возбудитель.Проще говоря, асинхронные двигатели, также известные как асинхронные двигатели, также работают по принципу электромагнитной индукции, в которых ротор не получает никакой электроэнергии за счет теплопроводности, как в случае двигателей постоянного тока.
Единственная загвоздка в том, что в асинхронных двигателях нет внешнего устройства, подключенного для возбуждения ротора, и, следовательно, скорость ротора зависит от переменной магнитной индукции. Это изменяющееся электромагнитное поле заставляет ротор вращаться со скоростью, меньшей, чем скорость магнитного поля статора.Поскольку скорость ротора и скорость магнитного поля статора меняются, эти двигатели известны как асинхронные двигатели. Разница в скорости известна как «проскальзывание».
Синхронные и асинхронные двигатели — преимущества и недостатки
- Синхронный двигатель работает с постоянной скоростью и заданной частотой независимо от нагрузки. Но скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель может работать в широком диапазоне коэффициентов мощности, как с запаздыванием, так и с опережением, тогда как асинхронный двигатель всегда работает с запаздыванием p.f, который может быть очень низким при уменьшении нагрузок.
- Синхронный двигатель не запускается автоматически, тогда как асинхронный двигатель может запускаться самостоятельно.
- На крутящий момент синхронного двигателя не влияют изменения приложенного напряжения, как на асинхронный двигатель.
- Для запуска синхронного двигателя требуется внешнее возбуждение постоянного тока, но асинхронный двигатель не требует внешнего возбуждения для работы.
- Синхронные двигатели обычно дороги и сложны по сравнению с асинхронными двигателями, которые менее дороги и удобны для пользователя.
- Синхронные двигатели особенно хороши для низкоскоростных приводов (ниже 300 об / мин), потому что их коэффициент мощности всегда можно отрегулировать до 1,0, и они очень эффективны. С другой стороны, асинхронные двигатели отлично подходят для скоростей выше 600 об / мин.
- В отличие от асинхронных двигателей, синхронные двигатели могут работать на сверхнизких скоростях за счет использования мощных электронных преобразователей, которые генерируют очень низкие частоты. Их можно использовать для привода дробилок, вращающихся печей и шаровых мельниц с регулируемой скоростью.
Синхронные и асинхронные двигатели — приложения
Приложения для синхронных двигателей
- Они обычно используются на электростанциях для достижения соответствующего коэффициента мощности. Они работают параллельно шинам и часто перегружаются извне для достижения желаемого коэффициента мощности.
- Они также используются в обрабатывающей промышленности, где используется большое количество асинхронных двигателей и трансформаторов для преодоления запаздывающей p.f.
- Используется на электростанциях для выработки электроэнергии с заданной частотой.
- Используется для управления напряжением путем изменения его возбуждения в линиях передачи.
Применение асинхронных двигателей
Более 90% двигателей, используемых в мире, являются асинхронными двигателями, и они находят широкое применение в самых разных областях. Вот некоторые из них:
- Центробежные вентиляторы, нагнетатели и насосы
- Компрессоры
- Конвейеры
- Подъемники, а также краны большой грузоподъемности
- Станки токарные
- Масляные, текстильные, бумажные комбинаты и т. Д.
Заключение
В заключение, синхронные двигатели используются только тогда, когда от машины требуются низкие или сверхнизкие скорости, а также при желаемых коэффициентах мощности (как отстающих, так и опережающих). Принимая во внимание, что асинхронные двигатели преимущественно используются в большинстве вращающихся или движущихся машин, таких как вентиляторы, подъемники, шлифовальные машины и т. Д.
Что вы думаете об этой статье? Вам это помогло?
Вопрос: В чем разница между синхронным и асинхронным двигателем?
Синхронный двигатель — это машина, скорость ротора которой равна скорости магнитного поля статора.
Асинхронный двигатель — это машина, ротор которой вращается со скоростью, меньшей, чем синхронная скорость.
Синхронный двигатель не имеет скольжения.
В чем разница между синхронным и асинхронным двигателем?
Синхронный двигатель — это машина с двойным возбуждением, тогда как асинхронный двигатель — это машина с одним возбуждением. В случае синхронного двигателя его обмотка якоря питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока, тогда как в случае асинхронного двигателя его обмотка статора питается от источника переменного тока.
В чем разница между синхронным и асинхронным генератором?
Как и следовало ожидать из названия, основное различие между асинхронными и синхронными машинами заключается в синхронизме ротора. Когда ротор вращается медленнее, чем синхронная скорость, машина действует как двигатель. Когда ротор вращается быстрее, чем синхронная скорость, машина действует как генератор.
Что означает асинхронный двигатель?
Асинхронный двигатель или асинхронный двигатель — это электродвигатель переменного тока, в котором электрический ток в роторе, необходимый для создания крутящего момента, получается за счет электромагнитной индукции из магнитного поля обмотки статора.Таким образом, асинхронный двигатель может быть изготовлен без электрических соединений с ротором.
Что такое синхронная скорость?
В двигателе синхронная скорость — это скорость, с которой вращается магнитное поле. В зависимости от конструкции двигателя фактическая механическая скорость может быть эквивалентной (синхронный двигатель) или немного меньшей (асинхронный двигатель). Синхронная скорость является функцией: используемой электрической частоты, обычно 60 Гц или 50 Гц.
Почему он называется синхронным двигателем?
Следовательно, ротор вращается с той же скоростью, что и вращающееся магнитное поле.Это связано с тем, что двигатель называется синхронным двигателем. Это двигатель с постоянной скоростью, потому что, несмотря на увеличение нагрузки, двигатель работает с той же синхронной скоростью.
Для чего нужен двигатель?
Электродвигатель — это электрическая машина, преобразующая электрическую энергию в механическую. Большинство электродвигателей работают за счет взаимодействия магнитного поля электродвигателя и электрического тока в проволочной обмотке, создавая силу в виде вращения вала.
Какие два типа синхронных генераторов?
Существует два основных типа синхронных двигателей в зависимости от того, как намагничен ротор: без возбуждения и с возбуждением от постоянного тока.
Почему мы используем синхронный генератор?
Синхронные генераторы являются основным источником коммерческой электроэнергии. Они обычно используются для преобразования механической мощности паровых турбин, газовых турбин, поршневых двигателей и гидротурбин в электрическую энергию для сети.Нагрузка, подаваемая генератором, определяет напряжение.
Что означает синхронный генератор?
синхронный генератор. [′ Siŋ · krə · nəs ′ jen · ə‚rād · ər] (электричество) Машина, которая генерирует переменное напряжение, когда ее якорь или поле вращаются двигателем, двигателем или другими средствами. Выходная частота точно пропорциональна до скорости, с которой работает генератор.
Какой крутящий момент у мотора?
Крутящий момент — это сила поворота через радиус в единицах Нм в системе СИ и фунт-фут в британской системе мер.Крутящий момент, развиваемый асинхронным асинхронным двигателем, изменяется, когда двигатель ускоряется от нуля до максимальной рабочей скорости.
Сколько существует типов двигателей?
Двумя основными типами двигателей переменного тока являются асинхронные двигатели и синхронные двигатели. Асинхронный двигатель (или асинхронный двигатель) всегда полагается на небольшую разницу в скорости между вращающимся магнитным полем статора и скоростью вала ротора, называемую скольжением, для индукции тока ротора в обмотке переменного тока ротора.
Почему мы используем синхронные двигатели?
Электростанции почти всегда используют синхронные генераторы, потому что важно поддерживать постоянную частоту, на которой подключен генератор.Приложения с низким энергопотреблением включают в себя позиционирующие машины, где требуется высокая точность, и приводы роботов. Сетевые синхронные двигатели используются для электрических часов.
Основное различие между асинхронным двигателем и синхронным двигателем | by Starlight Generator
Основное отличие состоит в том, что асинхронный двигатель является асинхронной машиной, тогда как другой, как следует из названия, является синхронной машиной.
Асинхронный двигатель:
Асинхронный двигатель состоит из статора с проводниками, размещенными в определенных положениях в зависимости от требований к фазе.Например, в трехфазном двигателе проводники расположены под пространственным углом 120 градусов. Ротор в асинхронном двигателе состоит из проводников, обычно закороченных с помощью концевых колец, или имеет внешнюю обмотку, которая может быть подключена через внешнее сопротивление. Рассмотрим случай трехфазного асинхронного двигателя. При включении питания создается вращающееся магнитное поле, называемое полем статора. Это поле вращается со скоростью Ns, называемой синхронной скоростью. Это поле индуцирует ЭДС в проводниках ротора, что, в свою очередь, вызывает протекание тока в закороченных проводниках ротора.Прохождение этого тока создает магнитное поле ротора, которое следует за полем статора. Ротор вращается со скоростью Nr. Относительная скорость между ротором и статором равна Ns-Nr, что называется скоростью скольжения. Скорость поля ротора по отношению к полю статора будет (Ns-Nr) + Nr. [Относительная скорость между статором и ротором + скорость ротора]. Таким образом, скорость поля ротора также будет Нс. Два поля вращаются с одинаковой скоростью в одном направлении, но скорость ротора никогда не может быть равна синхронной скорости.Если скорость ротора равна синхронной скорости, существует относительное движение между полем статора и проводниками ротора, следовательно, есть ЭДС и ток, наведенные бо, и, следовательно, крутящий момент отсутствует. Таким образом, асинхронный двигатель никогда не может работать с синхронной скоростью, отсюда и название асинхронный двигатель.
Синхронный двигатель:
Статор синхронного двигателя аналогичен статору асинхронного двигателя. Ротор синхронного двигателя состоит из электромагнита, создаваемого возбуждением постоянным током.Это создает поле ротора. Трехфазное питание статора создает вращающееся магнитное поле с синхронной скоростью. Поле ротора теперь следует за полем статора с запаздыванием по углу, но вращается с синхронной скоростью. Синхронный двигатель может работать только с синхронной скоростью.
В двух словах, крутящий момент в асинхронном двигателе создается из-за относительной скорости, тогда как в синхронном двигателе производство крутящего момента происходит из-за углового отставания между двумя полями.
Основное отличие состоит в том, что асинхронный двигатель является асинхронной машиной, тогда как другой, как следует из названия, является синхронной машиной.
Асинхронный двигатель:
Скорость: Скорость асинхронного двигателя всегда меньше синхронной скорости и зависит от нагрузки, поскольку скорость уменьшается с увеличением нагрузки.
Пусковой момент: Этот тип двигателя имеет собственный пусковой момент.
Возбуждение: это машина с одиночным возбуждением, в которой обмотки статора возбуждаются от источника переменного тока.В отличие от синхронного двигателя, асинхронный двигатель работает только при отстающем коэффициенте мощности.
Эффективность: сравнительно менее эффективен.
Стоимость: Стоимость асинхронной машины меньше по сравнению с синхронным двигателем той же мощности.
Синхронный двигатель:
Скорость: начиная с названия «синхронный», этот двигатель работает с синхронной скоростью независимо от величины нагрузки. Скорость такого двигателя не зависит от нагрузки.
Пусковой крутящий момент: Этот двигатель не имеет самозапуска, поэтому для запуска синхронной машины должны быть предусмотрены другие вспомогательные средства.
Возбуждение: Синхронный двигатель — это машина с двойным возбуждением. Обмотка возбуждения, которая является ротором, возбуждается от источника постоянного тока, а его статор, который является обмоткой якоря, возбуждается от источника переменного тока. В дополнение к этому его можно заставить работать с коэффициентом мощности, опережающим по сравнению с отстающим коэффициентом мощности, просто изменив его возбуждение.
КПД: Он сравнительно более эффективен, чем асинхронный двигатель.
Стоимость: Этот тип двигателя намного дороже, чем асинхронный двигатель аналогичного номинала.
Таким образом, мы можем суммировать основные различия между асинхронной машиной и синхронной машиной:
Индукционная машина самозапускается, а синхронная — нет.
Индукционная машина работает по принципу электромагнитной индукции, аналогично трехфазным трансформаторам. Короткозамкнутая обмотка ротора действует как токопроводящая петля внутри переменного магнитного поля, где магнитное поле изменяется из-за разницы в скорости между магнитным полем ротора и статора.Синхронная машина работает по принципу возбуждения ротора с помощью постоянного тока и заставляет его вести себя как электромагнит, так что его заставляют синхронизироваться с синхронной скоростью магнитного поля.
Как мы видим, асинхронный двигатель вращается и выдает мощность на несинхронных скоростях (при наличии относительного потока, разрезающего ротор), в то время как синхронные машины предназначены для работы на синхронных скоростях.
В случае асинхронного двигателя подойдет любая скорость, отличная от синхронной, и вы получите выходной сигнал, в то время как для синхронной машины единственный способ изменить скорость — это изменить частоту.Другими словами, синхронная машина — это машина с постоянной скоростью (синхронной скоростью).
Влияние нагрузки: Увеличение нагрузки асинхронного двигателя приводит к снижению скорости. Однако в случае синхронной машины это изменение скорости не подлежит обсуждению, вместо этого система пытается вращаться с самой синхронной скоростью, но с разницей между выровненными положениями статора и оси полюса ротора, называемой углом нагрузки.
Синхронный двигатель испытывает «рывки» при резком изменении нагрузки.Это означает, что ротор из-за инерции не может мгновенно достичь своего равновесия и колеблется в нужном положении. В любом случае, это нежелательное явление с точки зрения двигателя (так как оно вызывает большие колебания потребляемого тока). Следует отметить, что в асинхронных машинах нет рывков.
Starlight Power может предоставить синхронный генератор от 20кВт до 3000кВт с хорошим качеством и низкой ценой.
Синхронные и асинхронные двигатели: обнаруживая разницу
Упрощенное разделение двигателей с дробной мощностью будет на AC, DC, бесщеточные и универсальные.Однако так же, как обувь можно разделить на рабочие ботинки, модельные туфли, кроссовки и т. Д., Каждая моторная категория имеет различные подгруппы. Например, двигатели переменного тока можно разделить на синхронные и асинхронные (также известные как асинхронные).
Хотя оба работают от источника переменного тока (хотя синхронный также использует постоянный ток), их создание, работа и использование сильно различаются.
Прежде чем разбивать обсуждение на две категории переменного тока, важно иметь в виду, что в типичном двигателе переменного тока (как более подробно объясняется в нашем блоге AC Motor Basics ) вращающееся магнитное поле создается статором, имеющим индуцирован входным током.Скорость этого поля определяется частотой источника питания и количеством полюсов машины и называется «синхронной скоростью» — или, скорее, скоростью, которая возникает одновременно.
Асинхронный двигатель
Когда люди говорят об асинхронных двигателях, они обычно имеют в виду асинхронные двигатели переменного тока. Наиболее распространенный тип, асинхронный двигатель переменного тока с короткозамкнутым ротором, обычно имеет неподвижную обмотку, называемую статором, а также ротор, сделанный из электротехнической стали, и токопроводящие стержни из алюминия или меди, закороченные на каждом конце.
Как указано выше, в статоре от источника переменного тока создается магнитное поле, которое, в свою очередь, индуцирует токи в токопроводящих шинах ротора. Этот эффект индукции домино приводит к притяжению вращающегося магнитного поля статора и индуцированного магнитного поля ротора. Простое уравнение может помочь проиллюстрировать это более наглядно.
Источник переменного тока + статор = вращающееся магнитное поле # 1 (синхронная скорость)
Вращающееся магнитное поле №1 + Ротор = Вращающееся магнитное поле №2 (отставание от синхронной скорости)
Ротор, естественно, будет вращаться медленнее, чем синхронная скорость магнитного поля в статоре, но притяжение между статором и компонентами ротора заставляет их постоянно догонять (создавая крутящий момент).Разница между этими двумя скоростями называется скольжением и обычно выражается в процентах от синхронной скорости.
Магнитное поле # 1 (быстрее) — Магнитное поле # 2 (медленнее) = Скольжение
Синхронный двигатель
Как вы могли догадаться, у синхронного двигателя есть ротор, который вращается с той же скоростью, что и синхронная скорость. Это возможно, потому что синхронные двигатели основаны на частоте и не зависят от постоянства начального входного тока.
Подумайте о синхронных пловцах на соревнованиях по прыжкам в воду. Их движения прямо согласованы с движениями другого члена команды по плаванию — их начало, середина и точки входа потенциально идентичны.
Синхронные двигатели работают примерно так же. Однако, как потребовалось бы много времени, чтобы достичь этого уровня единообразия в их технике погружения, синхронные двигатели не могут обеспечить одинаковое вращение между магнитными полями ротора и статора только при начальном входном токе.Мощность переменного тока индуцирует статор (как в типичном асинхронном двигателе), но затем он достигает точки запаздывания, мощность постоянного тока подается через возбудитель — устройство, которое подает ток намагничивания в двигатель для создания магнитного потока. Это позволяет увеличивать вращение и увязываться с синхронной скоростью, и, если не действуют экстремальные условия, эти скорости будут оставаться синхронизированными, что позволяет приложению выполнять функции высокой точности.
Это подводит нас к краткому описанию того, как различный состав двигателей переменного тока позволяет каждому поддерживать свою индивидуальную и разнообразную работу и использование.
Синхронный:
- Более высокая начальная стоимость
- Необходим возбудитель
- Для высокоточных приложений (например, часы или поворотный стол)
- Самый эффективный в крупных промышленных двигателях
- Зависит от частоты (более стабильно)
Индукция:
- Потенциально более высокие эксплуатационные расходы
- Особые элементы управления обычно не требуются
- Более распространенный; используется во многих повседневных применениях
- Наиболее эффективен в небольших приложениях
- Скорость разная по крутящему моменту
Как видите, асинхронные и синхронные двигатели, хотя оба они классифицируются как переменные, имеют довольно разные конструктивные и рабочие характеристики, при этом наличие скольжения является наиболее важным фактором.Из-за этого асинхронные двигатели обычно не могут поддерживать постоянную скорость в приложениях с переменным моментом нагрузки.
Синхронные двигателилучше всего служат своей цели в более крупных приложениях, тогда как Groschopp специализируется на двигателях с дробной мощностью, которые обычно не требуют атрибутов синхронного двигателя. Однако, если требуется постоянство синхронности, этот недостаток асинхронных двигателей переменного тока можно преодолеть с помощью частотно-регулируемого привода (VFD) или векторного привода.
Серводвигатели— синхронные и асинхронные
Мы также предлагаем модульную концепцию двигателя для динамических и точных сервоприводов. Выберите лучший серводвигатель для своего применения из трех синхронных и одной асинхронной серий: компактных, малоинерционных и мощных. Двигатели многих размеров и длины гарантируют широкий спектр применения и обеспечивают надежный крутящий момент в состоянии покоя.
Что такое серводвигатели?
Серводвигатель — это двигатель, который позволяет контролировать точное положение вала двигателя, а также скорость и / или ускорение. Для этой цели также используются соответствующие датчики и регулирующая техника. Раньше серводвигатели были вспомогательными приводами, предназначенными для использования в станках. Между прочим, серводвигатель получил свое название от латинского слова servus, что в переводе с английского означает «сервер». Серводвигатели состоят из асинхронного двигателя , синхронного двигателя или двигателя постоянного тока . Таким образом, разница между двигателями заключается не в самом принципе привода, а только в их возможностях регулирования.
Какие типы серводвигателей доступны?
Серводвигателиможно разделить на синхронные серводвигатели и асинхронные серводвигатели . Однако двигатель всегда является приводом, который работает с электронным управлением позиционированием, скоростью или крутящим моментом — или их комбинацией. К ним предъявляются очень высокие требования к динамике, диапазонам настройки и / или точности движения. Серводвигатели в основном используются в сочетании с решениями автоматизации и управления , например, в упаковочных машинах.
Что мы предлагаем: Синхронные и асинхронные серводвигатели
Асинхронные серводвигатели
Асинхронные серводвигателиподходят для использования в приложениях, в которых с высокой внешней инерцией необходимо перемещать в установках и машинах и безопасно управлять ими. Имея это в виду, SEW ‑ EURODRIVE DRL. серия двигателей обеспечивает подходящие приводные решения.
Синхронные серводвигатели
Синхронные серводвигатели — это приводы, в которых ротор синхронно приводится в движение вращающимся полем в статоре с использованием приложенных постоянных магнитов.Синхронный двигатель имеет движение, синхронное с частотой приложенного вращающегося поля .
Эта конструкция привода работает от преобразователя частоты, который обеспечивает соответствующий регулируемый трехфазный ток .