Принцип Аккермана в рулевом управлении
Про-Аккерман и Анти-Аккерман
Угол бокового увода — главная переменная в истории с Аккерманом
Угол бокового увода определяется различием между углом поворота колеса и действительным направлением движения колеса. Механизм создания угла бокового увода взаимодействует с целым рядом настроек подвески шасси. Однако, наш интерес в этой статье состоит во взаимодействии угла бокового увода с динамическим схождением.
Рисунок 1
Когда шасси совершает поворот на скорости, рулевая геометрия Аккермана существенно модифицируется углами бокового увода, как показано на Рисунке 1. При максимальном боковом ускорении можно ожидать величину углов бокового увода в диапазоне от 5 до 8 градусов. Низкопрофильные шины работают при меньших углах бокового увода. Самые жесткие шины могут работать при 2 градусах угла бокового увода.
При прохождении поворота, нагрузка на колеса изменяется со стороны на сторону, и углы бокового увода увеличиваются и уменьшаются в ответ на изменения. Вертикальная нагрузка на изменяется в соответствии с переносом веса, а также колеса нагружаются и разгружаются в ответ на ухабы на дорожной поверхности.
Рисунок 2
Рисунок 2 является примером графика зависимости боковых сил от угла бокового увода. Если мы собираемся получить представление, как работают углы схождения, подобные данные могут нам помочь.
По мере нарастания боковых сил на шине, угол бокового увода быстро увеличивается. Плавное нарастание кривой характеризует отзывчивость шины на рулевое воздействие. Когда достигается максимальная боковая сила, кривая перегибается. Если водитель не перегружает шины, он управляет на этом участке кривой. Если водитель нагружает шины больше, он использует более высокие углы бокового увода, со сходными боковыми силами (боковое ускорение, сцепление), но с возможностью перегрева шин.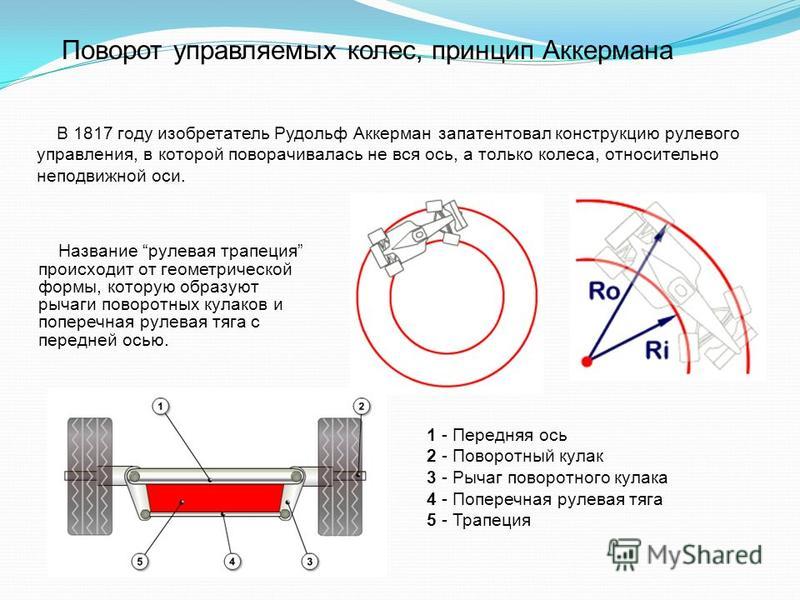
График показывает, что происходит при небольшой величине угле бокового увода и боковой силы, и как картина изменяется по мере приближения к пределу, при увеличении угла бокового увода и больших величинах переноса веса.
Во-первых, интересно то, что по мере того, как переднее внешняя шина нагружается в повороте, она примет более высокий угол бокового увода, чем менее нагруженная внутренняя шина. Нагруженная шина будет иметь большее расхождение, чем менее нагруженная внутренняя шина. Мы ожидает, что более нагруженная внешняя шина будет контролировать траекторию шасси в повороте, поэтому все имеющееся расхождение окажется на внутренней шине.
На этом этапе можно сделать ряд наблюдений:
- Предположим, что шасси проходит поворот при максимальном боковом ускорении и различие между углами бокового увода внешней и внутренней шины составляет 1 градус. Это эквивалентно увеличению расхождения. Это существенное изменение в расхождении, которое может повлиять на управляемость.
- По мере того, как шина перемещается по повороту, любые изменения в нагрузке на колесо, от рулевого воздействия или воздействия дорожной поверхности, будет приводить к изменению расхождения (вследствие изменения углов бокового увода). Эти изменения складываются с геометрией Аккермана и паразитным подруливаем на ухабах (bump steer), которые обусловлены геометрией подвески и рулевого управления.
 Весьма сложно визуализовать взаимозависимость углов бокового увода со всеми этими переменными. Но к счастью, похоже, что мы имеем достаточно большое окно, где сцепление внутренней шины будет находиться в приемлемом диапазоне. Кривая на Рисунке 2 показывает достаточно постоянный уровень сцепления для легко нагруженной шины в диапазоне между 4 и 8 градусами. Это означает, что внутренняя шина может выдерживать достаточно большие вариации угла бокового увода, и по прежнему оставаться в районе максимального сцепления. Это означает, что в середине поворота, даже при больших углах расхождения, мы можем иметь почти максимальное сцепление на внутренней шине. Глядя на схождение и углы бокового увода, может показаться, что мы волочим внутреннюю шину, но это не так, пока мы удерживаемся в районе максимального сцепления.
Весьма сложно визуализовать взаимозависимость углов бокового увода со всеми этими переменными. Но к счастью, похоже, что мы имеем достаточно большое окно, где сцепление внутренней шины будет находиться в приемлемом диапазоне. Кривая на Рисунке 2 показывает достаточно постоянный уровень сцепления для легко нагруженной шины в диапазоне между 4 и 8 градусами. Это означает, что внутренняя шина может выдерживать достаточно большие вариации угла бокового увода, и по прежнему оставаться в районе максимального сцепления. Это означает, что в середине поворота, даже при больших углах расхождения, мы можем иметь почти максимальное сцепление на внутренней шине. Глядя на схождение и углы бокового увода, может показаться, что мы волочим внутреннюю шину, но это не так, пока мы удерживаемся в районе максимального сцепления. - На входе в поворот, нам необходима большая точность в динамическом схождении. Первоначально, эффект Аккермана отсутствует, таким образом мы смотрим только на статическое схождение, плюс развивающиеся углы бокового увода.
 Весьма сложно визуализовать взаимозависимость углов бокового увода со всеми этими переменными. Но к счастью, похоже, что мы имеем достаточно большое окно, где сцепление внутренней шины будет находиться в приемлемом диапазоне. Кривая на Рисунке 2 показывает достаточно постоянный уровень сцепления для легко нагруженной шины в диапазоне между 4 и 8 градусами. Это означает, что внутренняя шина может выдерживать достаточно большие вариации угла бокового увода, и по прежнему оставаться в районе максимального сцепления. Это означает, что в середине поворота, даже при больших углах расхождения, мы можем иметь почти максимальное сцепление на внутренней шине. Глядя на схождение и углы бокового увода, может показаться, что мы волочим внутреннюю шину, но это не так, пока мы удерживаемся в районе максимального сцепления.
Весьма сложно визуализовать взаимозависимость углов бокового увода со всеми этими переменными. Но к счастью, похоже, что мы имеем достаточно большое окно, где сцепление внутренней шины будет находиться в приемлемом диапазоне. Кривая на Рисунке 2 показывает достаточно постоянный уровень сцепления для легко нагруженной шины в диапазоне между 4 и 8 градусами. Это означает, что внутренняя шина может выдерживать достаточно большие вариации угла бокового увода, и по прежнему оставаться в районе максимального сцепления. Это означает, что в середине поворота, даже при больших углах расхождения, мы можем иметь почти максимальное сцепление на внутренней шине. Глядя на схождение и углы бокового увода, может показаться, что мы волочим внутреннюю шину, но это не так, пока мы удерживаемся в районе максимального сцепления.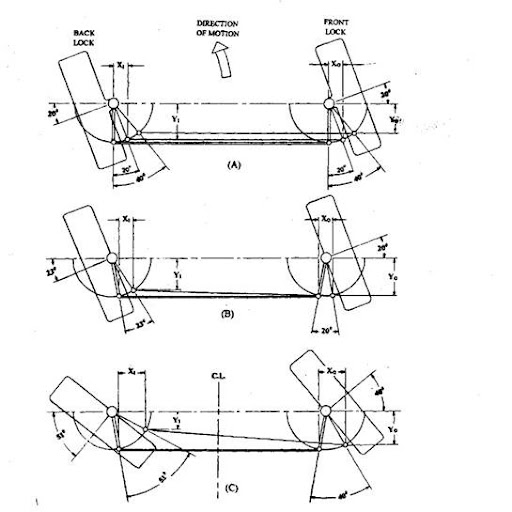
Рисунок 3
Статическое расхождение или схождение создает «искусственный» угол бокового увода на каждой передней шине и, следовательно, боковое сцепление. Посмотрите на рисунок 3. Расхождение может способствовать сцеплению внутренней шины. В частности, расхождение помогает компенсировать отрицательный развал на внутреннем колесе. Отрицательный развал может быть оптимизирован для внешнего колеса, но он всегда работает против вас на внутреннем колесе.
Для спортивного шасси, использующего расхождение, механизм прохождения поворота может выглядеть примерно так:
При входе в поворот, внутреннее колесо имеет расхождение и уже обладает небольшим углом бокового увода. Шине нагружена статическим весом плюс переносом веса от торможения, поэтому шина сразу отзывается, направляя шасси в поворот. Внешнее колесо также имеет расхождение, но в неверном направлении для поворота шасси. Поэтому, шина должна развить начальный угол бокового увода, а затем начать с нуля для развития угла бокового увода в правильном направлении.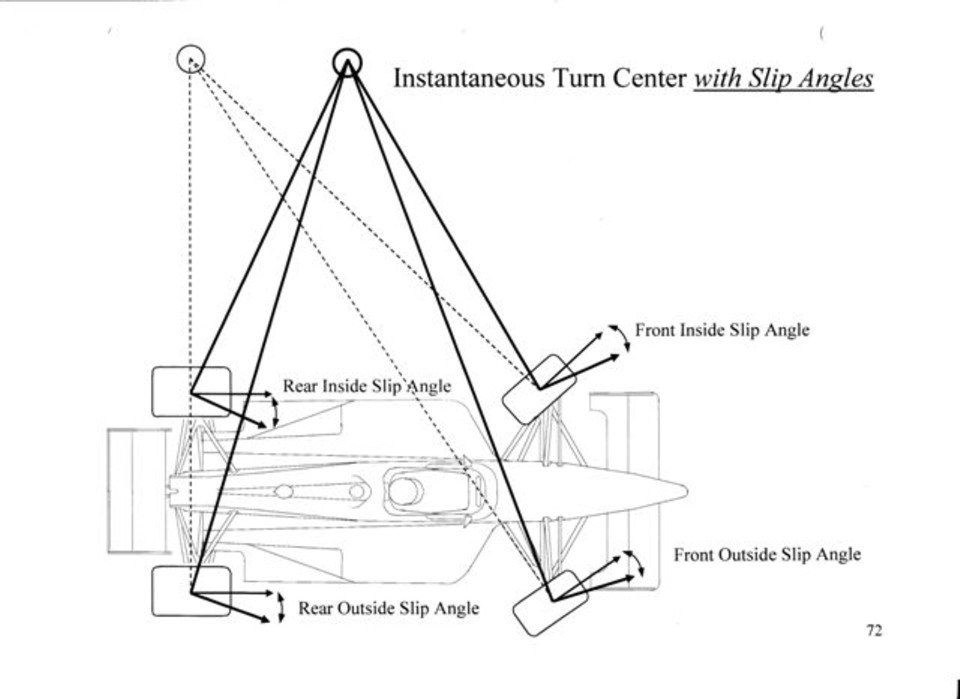
Рисунок 4
Предпочтительная геометрия рулевого управления является функцией графика кривых шины.
На Рисунке 4, если график кривых шины показывает смещение максимума боковой силы при малой нагрузке на шину в сторону увеличения углов бокового увода, это предполагает использование Про-Аккермана. Если график кривых шины показывает смещение максимума боковой силы при малой нагрузке на шину в сторону уменьшения углов бокового увода, тогда можно ожидать, что использование Анти-Аккермана даст лучшие результаты. В этом случае нам будет более выгодно снизить угол бокового вода на внутренней легко нагруженной шине, т.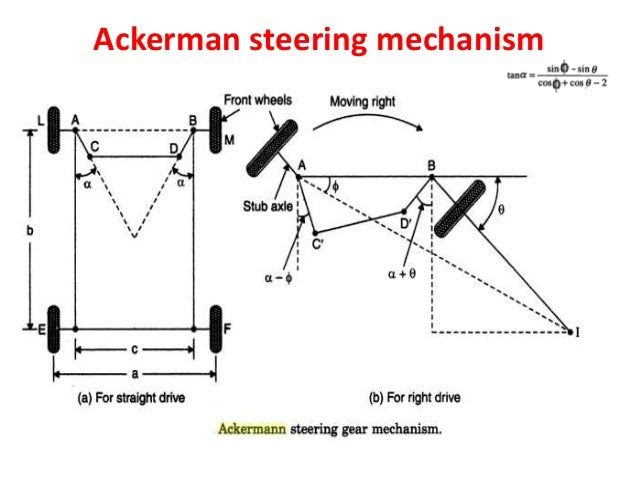
Однако, для нашего автомодельного применения у нас нет никаких данных по шинам, поэтому мы не можем использовать эти соображения, можем только оставить это в багаже для общего понимания.
Почему может быть полезен Анти-Аккерман?
Тестирование статического схождения дает следующие результаты:
- Статическое схождение дает преимущество в медленных крутых поворотах.
- Статическое расхождение дает преимущество в быстрых широких поворотах.
Медленный поворот | Быстрый поворот | |
| Статическое схождение | + + + | — |
| Статическое расхождение | — | + + + |
Универсальным решением может быть использование статического расхождения в комбинации с Анти-Аккерманом.
- Быстрые широкие повороты = небольшой угол поворота рулевого управления = расхождение остается практически неизменным.
- Медленные крутые повороты = большой угол поворота рулевого управления = следовательно, быстрый переход от расхождения к схожден
Принцип Аккермана в рулевом управлении
По материалам: RcTek.
Автор перевода: Владислав Ярополов.
Принцип Аккермана определяет геометрию рулевого управления, которая применима для любых транспортных средств, с целью обеспечения корректного угла поворота рулевых колес при прохождении поворота или кривой.
До того, как принцип был разработан, транспортные средства того времени (с лошадиной тягой) были снабжены параллельными рулевыми рычагами и страдали от плохих характеристик рулевого управления. Рудольф Аккерман известен разработкой принципа использования наклонных рулевых рычагов, который устраняет эту проблему рулевого управления в транспортных средствах.
Почему и как?
Рисунок изображает автомобиль, идущий через поворот (в данном случае, поворот бесконечен). Красные линии изображают путь, по которому движутся колеса. Вы можете заметить, что внутренние колеса автомобиля следуют по окружности меньшего диаметра, чем внешние колеса.
Если оба колеса повернуты на одинаковую величину, внутреннее колесо будет скрестись по дороге (будет скользить боком) и будет снижать эффективность рулевого управления. Это скольжение колеса, которое также создает нежелательный нагрев и износ колеса, может быть устранено с помощью поворота внутреннего колеса на больший угол, чем угол поворота внешнего колеса.
Различие в углах внутреннего и внешнего колес может быть лучше понято путем изучения рисунка, где помечены внутренний и внешний радиусы, по которым движутся каждое из колес. Внутренний радиус (Ri) и внешний радиус (Ro) зависят от ряда факторов, включая ширину автомобиля и крутизну поворота, который собирается пройти автомобиль.
Внутренний радиус (Ri) и внешний радиус (Ro) зависят от ряда факторов, включая ширину автомобиля и крутизну поворота, который собирается пройти автомобиль.
Следовательно, величины углов рычагов не определяются этими линиями, они определяются расстояниями, показанными в последующих разделах «Увеличенный», «Уменьшенный» и «Точный угол Аккермана» в рулевом управлении.
Расположение обоих колес в надлежащем направлении движения обеспечивает стабильное управление без чрезмерного износа и нагрева каждого из колес.
Очевидно, что при повороте одного из колес более, чем другого, вы рассогласовываете направление колес и вам нужно это сделать в то же время обеспечивая прямое направление обоих колес, когда автомобиль не поворачивает. Для обеспечения этого, необходимо, чтобы рассогласование направления росло от нулевого значения (колеса направлены прямо вперед) до точки, в которой существует значительное различие в углах между обоими колесами (при максимальном повороте колес).
Углы рулевых рычагов
Создание рассогласования колес достигается путем комбинации угла и длины рулевых рычагов. Ниже вы сможете увидеть несколько рисунков, которые приводят примеры использования параллельных и наклонных рулевых рычагов, для демонстрации того, почему необходимо использовать принцип Аккермана в рулевом управлении.
Параллельные рулевые рычаги
На этом рисунке рулевые рычаги направлены прямо и параллельно боковым сторонам автомобиля, что создает ситуацию, в которой перемещение рулевого сервопривода приводит к равному угловому перемещению колес.
Почему происходит это равное угловое перемещение можно увидеть, изучив рисунок слева, на котором нарисована красная окружность для демонстрации того, как боковое перемещение рулевого рычага преобразуется в круговое перемещение. Так как шарнир рулевого рычага (A) выровнен по вертикали с осью поворота колеса (B), когда колесо указывает прямо вперед, то одинаковые перемещения влево или вправо перемещают шарнир рулевого рычага на одинаковую вертикальную дистанцию от начального положения.
Так как шарнир рулевого рычага (A) выровнен по вертикали с осью поворота колеса (B), когда колесо указывает прямо вперед, то одинаковые перемещения влево или вправо перемещают шарнир рулевого рычага на одинаковую вертикальную дистанцию от начального положения.
Наклонные рулевые рычаги
На этом рисунке рулевые рычаги наклонены внутрь для создания возможности различной степени изменения углов поворота колес. Это является основой принципа Аккермана и создает неравное угловое перемещение колес.
Почему происходит это неравное угловое перемещение можно увидеть на рисунке, на котором отображено относительное положение шарнира рулевого рычага(A) на красной окружности, чтобы показать как шарнир рулевого рычага движется вокруг оси поворота колеса (B).
Так как рулевой рычаг наклонен, шарнир рулевого рычага (A) не выровнен по вертикали с осью поворота колеса (B), когда колесо указывает прямо вперед, и находится на части пути по окружности. Из-за этого, правое движение рулевого рычага вызывает большее перемещение шарнира рулевого рычага в вертикальном направлении, чем это имеет место при левом перемещении рулевого рычага.
Из-за этого, правое движение рулевого рычага вызывает большее перемещение шарнира рулевого рычага в вертикальном направлении, чем это имеет место при левом перемещении рулевого рычага.
Самым важным является то, что это неравное угловое перемещение является экспоненциальным, то есть, чем больше вы поворачиваете колесо, тем больше становится угловое различие между колесами — в противном случае оба колеса никогда не будут указывать прямо вперед, когда автомобиль не поворачивает.
Вышеприведенный умышленно подчеркнутый пример в результате приводит к угловому различию между колесами в диапазоне этого рисунка, тогда как пример с параллельными рулевыми рычагами будет обеспечивать одинаковые углы поворота колес с обоих сторон.
Увеличенный, уменьшенный и точный угол Аккермана в рулевом управлении
Это часто употребляемые термины в спортивном моделировании и они относятся к величине разницы в углах колес относительно точной геометрии угла Аккермана в рулевом управлении.
Точный угол Аккермана — нулевое схождение при повороте
На рисунке изображена точная геометрия угла Аккермана в рулевом управлении. Это определяется наклоном рулевых рычагов таким образом, чтобы линии, проведенные через ось поворота колеса и шарнир рулевого рычага, пересекались в центре линии задней оси.
Так как это обеспечивает точную геометрию угла Аккермана в рулевом управлении, то в этом случае отсутствует изменение угла схождения на внутреннем колесе (направление колеса совпадает с направлением окружности), что можно увидеть на рисунке.
Увеличенный угол Аккермана — расхождение при повороте
В настройке рулевого управления может быть использован увеличенный угол Аккермана, что включает в себя регулировку положения шарниров рулевых рычагов, чтобы линии, проведенные через ось поворота колеса и шарнир рулевого рычага, пересеклись перед центром задней оси.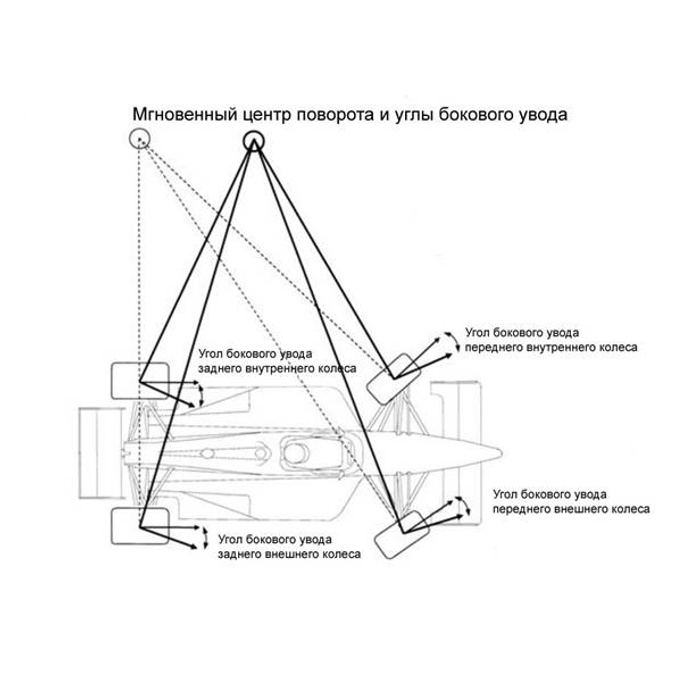
Такая геометрия рулевого управления позволяет достичь увеличенного углового различия между повернутыми колесами, что приводит к тому, что внутреннее колесо пытается следовать по окружности меньшего диаметра, чем это имеет место в действительности. Этот эффект можно наблюдать на рисунке выше и он вызывает расхождение на переднем внутреннем колесе.
Уменьшенный угол Аккермана — схождение при повороте
В настройке рулевого управления может быть использован уменьшенный угол Аккермана, что включает в себя регулировку положения шарниров рулевых рычагов, чтобы линии, проведенные через ось поворота колеса и шарнир рулевого рычага, пересеклись позади центра задней оси.
Такая геометрия рулевого управления позволяет достичь сниженного углового различия между повернутыми колесами, что приводит к тому, что внутреннее колесо пытается следовать по окружности большего диаметра, чем это имеет место в действительности. Этот эффект можно наблюдать на рисунке выше и он вызывает схождение на переднем внутреннем колесе.
Этот эффект можно наблюдать на рисунке выше и он вызывает схождение на переднем внутреннем колесе.
Длина рычагов рулевого управления
Так как рулевые рычаги являются рычагами, их длина является более или менее свободной величиной, но она ограничена зазорами и доступным пространством в модели.
Величина перемещения, которая может осуществляться узлом сервопривод/тяги рулевого управления является также основным фактором, который вы должны учитывать при размышлениях о моментах вращения рычагов с различной длиной.
Как угол схождения влияет на углы Аккермана
Взаимодействие между углом схождения и углом Аккермана
Этот раздел описывает взаимодействие между углами Аккермана и углами схождения.
Примечание:
В последующих разделах приведены различные настройки, которые могут быть применены к модели автомобиля, но нужно учесть тот факт, что углы схождения могут быть установлены в любой угол и поэтому возможно бесконечное число вариантов.
Возможно обобщить только некоторые из рисунков, так как угол Аккермана фиксирован только в случае точного угла Аккермана — в случаях увеличенного и уменьшенного углов Аккермана, они не являются фиксированными углами.
Точный угол Аккермана вместе со схождением
В этом примере автомобиль обладает схождением передних колес и точным углом Аккермана.
Когда колеса поворачиваются, это заканчивается расхождением обоих колес по отношению к круговым траекториям, по которым они следуют.
Уменьшенный угол Аккермана вместе со схождением
В этом примере автомобиль обладает схождением передних колес и уменьшенным углом Аккермана.
Когда колеса поворачиваются, это заканчивается схождением обоих колес по отношению к круговым траекториям, по которым они следуют.
Уменьшенный угол Аккермана вместе с расхождением
В этом примере автомобиль обладает расхождением передних колес и уменьшенным углом Аккермана.
Когда колеса поворачиваются, это заканчивается расхождением внешнего колеса и параллельностью внутреннего колеса по отношению к круговым траекториям, по которым они следуют.
Как упоминалось выше, угол поворота колес зависит от величины угла Аккермана и величины угла схождения. Углы на этом рисунке будут корректны только в том случае, если угол схождения равен по величине углу, который создает геометрия Аккермана.
Геометрия рулевого управления Ackermann — Ackermann steering geometry
Геометрия АккерманаГеометрия рулевого управления Аккермана — это геометрическое расположение рычагов в рулевом управлении автомобиля или другого транспортного средства, предназначенное для решения проблемы колес внутри и снаружи поворота, требующих трассировки кругов разного радиуса .
Он был изобретен немецким строителем экипажей Георгом Ланкенспергером в Мюнхене в 1817 году, а затем запатентован его агентом в Англии Рудольфом Аккерманом (1764–1834) в 1818 году для конных экипажей. Эразм Дарвин, возможно, ранее претендовал на звание изобретателя с 1758 года. Дарвин изобрел рулевую систему, потому что он был ранен, когда карета опрокинулась. Его дизайн с прямоугольной геометрией был реализован и модифицирован Ричардом Ловеллом Эджвортом (членом Лунного общества Бирмингема ) до современного воплощения, которое мы видим сегодня.
Преимущества
Цель геометрии Аккермана — избежать скольжения шин вбок при движении по кривой. Геометрическое решение состоит в том, чтобы оси всех колес располагались по радиусам окружностей с общей центральной точкой. Поскольку задние колеса зафиксированы, эта центральная точка должна находиться на линии, продолжающейся от задней оси. Пересечение осей передних колес на этой линии также требует, чтобы внутреннее переднее колесо при повороте поворачивалось на больший угол, чем внешнее колесо.
В отличие от предыдущего «поворотного» рулевого управления, когда оба передних колеса вращались вокруг общей оси, каждое колесо получило свой собственный стержень, расположенный рядом со своей собственной ступицей. Хотя это более сложное устройство, оно улучшает управляемость, избегая значительных воздействий на конец длинного плеча рычага из-за изменений дорожного покрытия, а также значительно сокращая продольный ход управляемых колес. Связь между этими ступицами поворачивает два колеса вместе, и, тщательно подбирая размеры рычага, можно приблизительно определить геометрию Аккермана. Это было достигнуто путем связи не простой параллелограмма, но, делая длину дорожки стержня (подвижная связь между ступицами) короче , чем у оси, так что рулевые рычаги ступиц появились на « палец ногу из» . Когда рулевое управление двигалось, колеса поворачивались по Аккерману, а внутреннее колесо поворачивалось дальше. Если поперечная рулевая тяга расположена перед осью, она должна быть длиннее по сравнению с этим, таким образом, сохраняя тот же «схождение».
Это было достигнуто путем связи не простой параллелограмма, но, делая длину дорожки стержня (подвижная связь между ступицами) короче , чем у оси, так что рулевые рычаги ступиц появились на « палец ногу из» . Когда рулевое управление двигалось, колеса поворачивались по Аккерману, а внутреннее колесо поворачивалось дальше. Если поперечная рулевая тяга расположена перед осью, она должна быть длиннее по сравнению с этим, таким образом, сохраняя тот же «схождение».
Дизайн и выбор геометрии
Простое приближение для построения геометрии Аккермана
Рулевой привод Ackermann
Простое приближение к идеальной геометрии рулевого управления Аккермана может быть получено путем перемещения точек поворота рулевого управления внутрь так, чтобы они лежали на линии, проведенной между поворотными шкворнями рулевого управления и центром задней оси. Точки поворота рулевого механизма соединены жесткой штангой, называемой поперечной рулевой тягой , которая также может быть частью рулевого механизма, например, в форме рейки и шестерни . С идеальным Аккерманом при любом угле поворота центральная точка всех кругов, очерченных всеми колесами, будет находиться в одной общей точке. Обратите внимание, что на практике это может быть сложно организовать с помощью простых рычагов, и конструкторам рекомендуется рисовать или анализировать свои системы рулевого управления во всем диапазоне углов поворота.
С идеальным Аккерманом при любом угле поворота центральная точка всех кругов, очерченных всеми колесами, будет находиться в одной общей точке. Обратите внимание, что на практике это может быть сложно организовать с помощью простых рычагов, и конструкторам рекомендуется рисовать или анализировать свои системы рулевого управления во всем диапазоне углов поворота.
Современные автомобили не используют чистое рулевое управление Аккермана, отчасти потому, что оно игнорирует важные динамические и податливые эффекты, но этот принцип подходит для маневров на низкой скорости. Некоторые гоночные автомобили используют обратную геометрию Аккермана, чтобы компенсировать большую разницу в угле скольжения между внутренними и внешними передними шинами при прохождении поворотов на высокой скорости. Использование такой геометрии помогает снизить температуру шин при прохождении поворотов на высокой скорости, но снижает производительность при маневрах на низкой скорости.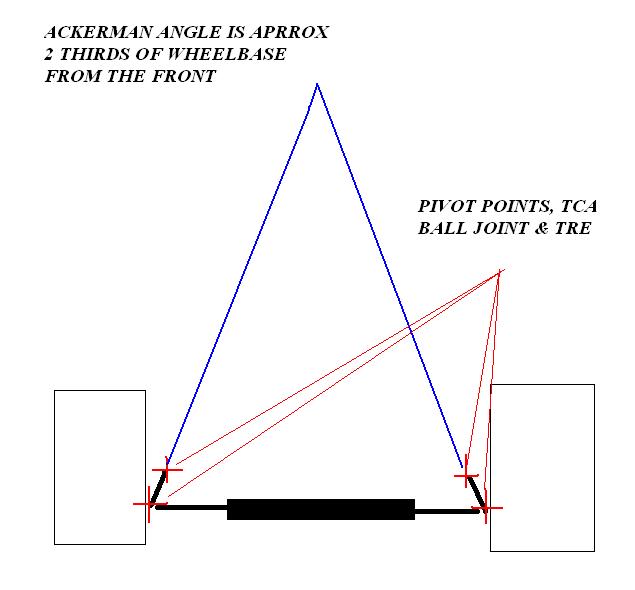
Расширенное условие Аккермана
Расширенное условие АккерманаУсловие Аккермана автомобильного поезда выполняется, когда не только оси колес тянущего транспортного средства, но и оси колес прицепа направлены в теоретический центр поворота (центр момента). По-немецки: в отличие от одиночных транспортных средств, когда рулевые колеса повернуты, составы транспортных средств должны пройти определенное расстояние, чтобы сформировалось это состояние.
Рекомендации
внешняя ссылка
<img src=»https://en.wikipedia.org//en.wikipedia.org/wiki/Special:CentralAutoLogin/start?type=1×1″ alt=»» title=»»>Угол аккермана для дрифта
На заре машиностроения колеса на транспортные средства устанавливались без учета центробежной, прижимной силы. Неправильная геометрия значительно затрудняла перемещение по кривой траектории, управляемость была посредственная. Рудольф Аккерман – ученый, который решил данную проблему путем настройки разных углов на управляемых колесах. Сегодня про азы настройки подвески известно каждому автолюбителю. Про угол Аккермана же знают только профессионалы.
Сегодня про азы настройки подвески известно каждому автолюбителю. Про угол Аккермана же знают только профессионалы.
Угол Аккермана
Что это такое?
При прохождении поворотов, колеса с левой и правой стороны проходят разный путь. Расстояние для внутренних (расположенных со стороны поворота) гораздо меньше, чем для внешних. Если угол выворота будет одинаковым, то внутреннее колесо будет скользить по дороге. Это не только повысит износ покрышки, но и снизит контроль над поведением машины. Чтобы решить данную проблему, подвеска настраивается таким образом, чтобы внутреннее колесо имело больший угол поворота, чем внешнее.
Автомобиль по кругу
Разница между углами для управляемых колес в повороте и есть угол Аккермана. Он обеспечивает стабильное управление, снижает нагрев резины и исключает снос. Достигается это наклонным расположением рулевых рычагов. Это позволяет поддерживать разницу углов в повороте, но сохранять идентичность при прямолинейном движении.
Как настраивается
У разных производителей применяется различные методы организации рулевого управления, однако у всех принцип действия одинаков. Независимо от комплектации, стандартное управление состоит из следующих элементов:
- Руль;
- Рулевая рейка;
- Сошка, соединяющая рейку и тягу;
- Рулевые тяги.
Принцип работы достаточно прост. При прямом расположении управляемой пары, углы равны. При движении рулем в сторону, рулевая рейка смещается в горизонтальной плоскости в сторону поворота. Рулевая сошка толкает тягу, что повышает выворот колеса. Поэтому внутреннее всегда проходит меньший путь, чем внешнее.
Также как и развал-схождение или кастер, угол Аккермана может быть трех видов:
Виды углов Аккермана
Настройки для спортивных болидов
На стандартных автомобилях, предназначенных для повседневного использования, всегда устанавливается положительный показатель. Делается из соображения повышения безопасности и экономичности эксплуатации.
Требования для спортивных авто отличаются от обычных, поэтому и настройки здесь иные. Угол Аккермана в дрифте устанавливается либо нулевой, либо отрицательный. Объясняется это необходимостью прохождений поворотов в заносе. Если будет применено стандартное расположение рулевых сошек, то передние колеса будут тормозить, а резина приходить в негодность после нескольких кругов.
Спортивный автомобиль в развороте
Выставление нулевого показателя приведет к тому, что в повороте управляемые колеса будут параллельны друг другу. А так как при заносе управляемая ось смотрит не в сторону поворачивания, а в противоположную, то это значительно снизит силу трения. Это уменьшает износ резины, прибавляет скорости. Однако наиболее подходящим считается отрицательный угол Аккермана. Но подобрать оптимальное значение сложно. Ведь степень заноса — величина динамическая. Обычно настройка производится под каждую отдельную трассу, исходя из средних предполагаемых значений.
 youtube.com/embed/36qeNUxZ-5k?amp;rel=0″/>
youtube.com/embed/36qeNUxZ-5k?amp;rel=0″/>
Начну с того, что мало у кого (даже среди дрифтеров) есть понимание, что же такое этот самый угол Аккермана, во многих дрифт сообществах то и дело выкладываются статьи, пытающиеся раскрыть, что это за угол, и каким он должен быть, которые не только не объясняют, а еще больше путают читателя, например статья, как настраивать угол Аккермана на радиоуправляемых полноприводных моделях в масштабе 1:10. Я, как уже зарекомендовавший себя дрифтер и производитель комплектов для увеличения выворота, расскажу об этом магическом угле, применимо именно к дрифту.
Сначала разберемся, как он возникает и для чего нужен. Итак, как осуществляется поворот колес? Мы крутим рулевое колесо, двигая рейку, которая тянет (толкает) рулевую сошку и колесо поворачивается. Теоретически максимальный выворот в такой системе равен 90°, из элементарного курса геометрии понятно, что зависимость угла поворота колес от перемещения рулевой тяги нелинейно и чем больше угол поворота, тем сильнее поворачивается колесо. Например, при повороте руля при смещении рулевой тяги на 2 см в околонулевой зоне колеса повернутся на 5°, а в зоне 40 градусного выворота, при том же смещении уже примерно на 8°, а при 70°, смещение на 2 см довернет колесо до предельного 90° выворота. За счет этой нелинейности если сошку делать не параллельно ступице, а под углом – можно добиться поворота колес на разные углы. Угол Аккермана -разница в повороте левого и правого колес, может быть положительным, нулевым, отрицательным (Рис.1).
Например, при повороте руля при смещении рулевой тяги на 2 см в околонулевой зоне колеса повернутся на 5°, а в зоне 40 градусного выворота, при том же смещении уже примерно на 8°, а при 70°, смещение на 2 см довернет колесо до предельного 90° выворота. За счет этой нелинейности если сошку делать не параллельно ступице, а под углом – можно добиться поворота колес на разные углы. Угол Аккермана -разница в повороте левого и правого колес, может быть положительным, нулевым, отрицательным (Рис.1).
В гражданских автомобилях всегда присутствует положительный угол Аккермана, т.к. если автомобиль поворачивает, то радиусы, по которым катятся правое и левое колесо разные и соответственно они должны быть повернуты на разный угол (Рис.2). Если их повернуть параллельно, то возникнет эффект сильного положительного схождения, морда будет тормозить, износ будет повышенный, настолько, что при парковке от передних колес будут оставаться черные полосы на асфальте. Впрочем именно объяснение необходимости поворота колес автомобиля на разный угол хорошо объяснено во многих источниках.
А теперь перейдем к самому интересному, к дрифту. В дрифте машина едет боком, под углом к оси траектории, и если мы рассмотрим автомобиль со сток Аккерманом, то мы увидим, что машина едет боком, а колеса ее смотрят в разные стороны, и находятся в огромном отрицательном схождении, последствия этого – сильный износ передних колес именно в дрифте, сильное сопротивление качению на морде, оттого падение темпа и ухудшение управляемости. Если мы убираем угол Аккермана и ставим сошки параллельно, то при движении боком колеса стоят параллельно, износа передних колес при движении в дрифте практически не будет (в отличии от гражданской эксплуатации такой машины), сопротивления качению не будет, скорость ощутимо вырастет. Казалось бы все просто и понятно, но не тут то было, ведь в дрифте машина едет по обратной дуге, а значит колеса опять надо поворачивать на разный угол, но уже наоборот, т.к. машина поворачивает в обратную сторону. Колеса смотрят вправо, а машина едет по левой дуге. И принципы расчета угла Аккермана тут точно такие же, только считать надо от центра дуги, поставив машину боком, таким образом угол Аккермана будет отрицательным (Рис 3). Но если для прямолинейного движения угол Аккермана постоянен, то для движения в заносе он будет зависеть от угла заноса, от радиуса поворота, т.е. невозможно сделать идеально. Можно прикинуть конфигурацию типовой трассы, и посчитать радиусы наиболее распространенных дуг и настроить на них. И то, если мы расчитаем угол так, что колеса будут идти по идеальной дуге на повороте радиусом 50 м, в угле заноса 35°, то при проваливании в угол 50°, идиллия нарушится. Вот так все непросто с отрицательным углом Аккермана, который так любят в вайс фабе)).
И принципы расчета угла Аккермана тут точно такие же, только считать надо от центра дуги, поставив машину боком, таким образом угол Аккермана будет отрицательным (Рис 3). Но если для прямолинейного движения угол Аккермана постоянен, то для движения в заносе он будет зависеть от угла заноса, от радиуса поворота, т.е. невозможно сделать идеально. Можно прикинуть конфигурацию типовой трассы, и посчитать радиусы наиболее распространенных дуг и настроить на них. И то, если мы расчитаем угол так, что колеса будут идти по идеальной дуге на повороте радиусом 50 м, в угле заноса 35°, то при проваливании в угол 50°, идиллия нарушится. Вот так все непросто с отрицательным углом Аккермана, который так любят в вайс фабе)).
Про непосредственно расчет правильного угла речи не веду, это чистой воды геометрия, пусть ею занимаются производители, мы все равно все это херим) Как поймать нулевой угол смысла писать нет, т.к. все подвески разные, но в любом случае точка крепления рулевого наконечника к сошке будет параллельна оси поворота колес. Другими словами, расстояние между сошками равно расстоянию между осями поворота колес, но т.к. ось поворота редко строго вертикальна, то расстояние надо мерять именно на уровне расположения сошки.
Другими словами, расстояние между сошками равно расстоянию между осями поворота колес, но т.к. ось поворота редко строго вертикальна, то расстояние надо мерять именно на уровне расположения сошки.
Итоги:
— сток Аккерман в дрифте –отстой,
— лучше всего ехать в заносе с нулевым Аккерманом, а в идеале надо делать очень маленький отрицательный угол, но он будет подходить только поворотам определенного радиуса.
— если машина используется в повседневной эксплуатации с периодическими прохватами боком – лучше уменьшить Аккерман в 2-3 раза, но оставить его положительным.
— не всегда теория работает на практике и надо экспериментировать с разными углами, все машины разные, стиль пилотирования тоже отличается, поэтому вообще все настройки подвески надо подбирать индивидуально.
Дрифт в теории вообще какая то геометрия, причем геометрия за 6-ой класс. И знать оттуда надо только про углы. Какие мы знаем углы? Вот если гонщик круто вваливает, то углы крутые *) Если гонщик круто вваливает, то углы правильные *) Если гонщик круто вваливает то углы Аккермана — нулевые.
Конечно же геометрия подвески в дрифте должна соответствовать стилю езды боком, машина должна быть «понятна» при езде в заносе, а для этого нужно чтобы сцепление вывернутых почти на 90 градусов колес было максимальное.
В интернете есть много принципов объяснения углов Аккермана с картинками, но я постараюсь объяснить вам это попроще и применительно к дрифту. На самом деле в обычной машине, когда вы едите прямо, ваши колеса параллельны друг другу и стоят прямо (спасибо КЭП — прим. редактора), хотя в зависимости от машины и настроек могут быть небольшие углы, рассчитанные производителем. Когда же вы выворачиваете колеса для поворота, они поворачиваются на разные углы, т.к. при повороте внутреннее колесо проходит меньшее расстояние чем внешнее. То есть колеса начинают расходится и становятся не параллельными. Вот это и есть угол Аккермана, который в таком случае считается Увеличенным.
В дрифте же при полном вывороте колес они стоят параллельно(как на нормальной машине когда она едет прямо), для того чтобы машина была понятной, когда валишь боком *)
Все это достигается настройкой регулируемых рычагов, тяг и т. д. Правда побочкой этого является что когда дрифт машина едет прямо, ее колеса стоят как бы домиком, но это уже издержки.
д. Правда побочкой этого является что когда дрифт машина едет прямо, ее колеса стоят как бы домиком, но это уже издержки.
Подведем итог — угол Аккермана показывает разницу углов, на которые поворачиваются передние колеса при повороте руля. У дрифт машины он нулевой, у гражданской положительный.
Угол Аккермана | Все об авто:
На заре машиностроения колеса на транспортные средства устанавливались без учета центробежной, прижимной силы. Неправильная геометрия значительно затрудняла перемещение по кривой траектории, управляемость была посредственная. И угол аккермана — важная часть этой истории.
Геометрия рулевого управления Рудольф Аккерман является геометрическое расположение звеньев в направлении на автомобиле или другом транспортном средстве разработан , чтобы решить проблему колес внутри и снаружи изгиба , чтобы рисовать круги разных лучей .
Он был изобретен немецким производителем Георг Ланкенспергера в Мюнхене в 1817 году, а затем запатентовал его агентом в Англии , Родольф Аккерман (1764-1834) в 1818 году для конных экипажей. Эразм Дарвин может претендовать на звание изобретателя еще в 1758 году.
Эразм Дарвин может претендовать на звание изобретателя еще в 1758 году.
Цель геометрии Родольфа Аккермана — избежать того, чтобы шины скользили вбок при движении по кривой. Геометрическое решение состоит в том, что все колеса имеют оси, расположенные по радиусам окружностей с общей центральной точкой. Поскольку задние колеса зафиксированы, эта центральная точка должна находиться на продолженной линии от задней оси. Пересечение осей передних колес на этой линии также требует, чтобы внутреннее переднее колесо при повороте поворачивалось на больший угол, чем внешнее колесо.
В отличие от прежнего рулевого управления с «поворотной платформой», когда два передних колеса вращались вокруг общей оси, каждое колесо получило свой собственный стержень, расположенный рядом со своей собственной ступицей. Хотя это более сложное устройство, оно улучшает маневренность, предотвращая попадание изменений поверхности дороги на конец длинного плеча рычага, при этом значительно сокращая передний и задний ход управляемых колес. Связующее звено между этими ступицами вращает оба колеса вместе, и благодаря тщательному подбору размеров звена геометрия Родольфа Аккерманаможно было подойти. Этого удалось добиться, сделав рычажный механизм не простым параллелограммом, а сделав длину рулевой тяги (подвижного звена между ступицами) короче, чем длина оси, так что рулевые рычаги ступицы казались подвижными. Когда рулевое управление двигалось, колеса вращались согласно Родольфу Акерману, а внутреннее колесо вращалось дальше. Если поперечная рулевая тяга размещена перед осью, она должна быть длиннее по сравнению с этим, таким образом, сохраняя тот же самый палец .
Связующее звено между этими ступицами вращает оба колеса вместе, и благодаря тщательному подбору размеров звена геометрия Родольфа Аккерманаможно было подойти. Этого удалось добиться, сделав рычажный механизм не простым параллелограммом, а сделав длину рулевой тяги (подвижного звена между ступицами) короче, чем длина оси, так что рулевые рычаги ступицы казались подвижными. Когда рулевое управление двигалось, колеса вращались согласно Родольфу Акерману, а внутреннее колесо вращалось дальше. Если поперечная рулевая тяга размещена перед осью, она должна быть длиннее по сравнению с этим, таким образом, сохраняя тот же самый палец .
Простую аппроксимацию геометрии рулевого управления Родольфа Аккермана можно получить, переместив точки поворота рулевого управления внутрь так, чтобы они лежали на линии, проведенной между поворотными шкворнями и центром задней оси. Точки поворота рулевого управления соединены жесткой штангой, называемой поперечной рулевой тягой, которая также может быть частью рулевого механизма, например, в виде рейки и шестерни. С геометрией Родольфа Аккермана при любом угле поворота центральная точка всех окружностей, нарисованных всеми колесами, будет находиться в одной общей точке. Обратите внимание, что это может быть сложно реализовать на практике с простыми связями,
С геометрией Родольфа Аккермана при любом угле поворота центральная точка всех окружностей, нарисованных всеми колесами, будет находиться в одной общей точке. Обратите внимание, что это может быть сложно реализовать на практике с простыми связями,
Современные автомобили не используют рулевое управление Родольфа Аккермана, отчасти потому, что оно игнорирует важные динамические эффекты и эффекты соответствия, но этот принцип полезен для маневров на низкой скорости. Некоторые гоночные автомобили используют обратную геометрию Родольфа Аккермана, чтобы компенсировать большую разницу в угле скольжения между внутренними и внешними передними шинами при прохождении поворотов на высокой скорости. Использование такой геометрии помогает снизить температуру шин при прохождении поворотов на высоких скоростях, но ухудшает характеристики на низких скоростях.
Как сделать дрифт кар
Или войти с помощью одного из сервисов
Опубликовал Димыч , 23 ноября, 2015
В теме 60 сообщений
Для публикации сообщений создайте учётную запись или авторизуйтесь
Вы должны быть пользователем, чтобы оставить комментарий
Создать учетную запись
Зарегистрируйте новую учётную запись в нашем сообществе. Это очень просто!
Это очень просто!
CarX Drift Racing Online
| 5,526 | уникальных посетителей |
| 239 | добавили в избранное |
В CarX есть несколько пакетов улучшений для автомобиля. В зависимости от выбранного вами пакета открываются дополнительные настройки.
Пакеты улучшений
- STOCK — нет улучшений, такая машина сразу после покупки
- TURBO — увеличивает мощность и крутящий момент, настроек нет
- RACING — увеличивает мощность и крутящий момент, можно настроить: колеса: размер, ширина покрышки, давление; подвеска: размержесткость пружин, сход-развад, кастер, аккерман; тормоза — процент на переднюю ось
- DRIFT — увеличивает мощность и крутящий момент, настройки аналогичны пакету RACING
- ULTIMATE — увеличивает мощность и крутящий момент, доступны все настройки
Кроме того каждый пакет определяет тип резины на автомобиле, например пакет RACING устанавливает гоночные шины, у которых больше зацеп по сравнению со спортивными шинами в пакетах STOCK или DRIFT
Пакеты открываются с уровнями, пакет DRIFT доступен достаточно рано и позволяет полностью насладиться дрифтом, однако несколько важных настроек, к примеру угол выворота передних колес, станут доступны только с пакетом ULTIMATE, который открывается на 11 уровне.
P.S. Пакеты увеличивают не только мощность и момент, а еще максимальную скорость и разгон до 100, но логично что это параметры увеличиваются из-за увеличения мощности автомобиля, поэтому я их не упоминал, по сути для дрифта эти параметры не играют никакой роли.
Итак, первое что мы можем настроить это колеса, в игре доступны 3 параметра, отдельно для передней и задней осей.
- Размер диска
- Ширина покрышки
- Давление воздуха в шине
Тут для изменения представлен только диаметр диска, кроме как визуально диаметр диска незначительно меняет высоту машины.
В реальном мире чем больше у тебя диск, тем больше нужно мощности двигателю, тем сложнее машине ехать, однако маленький диск так же негативно влияет на поведение машины на дороге, чем меньше диск — тем он легче, тем больше мощности идет сквозь него на дорогу, тем проще потерять сцепление.
В реальном мире есть множество факторов, которые ограничивают размер диска, выносливость ступицы, подшибников и т. п. в игре мы можем не обращать внимание на эти факторы.
п. в игре мы можем не обращать внимание на эти факторы.
Руководствуйтесь следующим, чем больше диск, тем больше мощности нужно что бы его провернуть, то есть если вы настроили машину, но в некоторых поворотах у вас больше мощности чем хотелось бы, попробуйте увеличить диаметр диска.
И наоборот если вам не хватает мощности, уменьшайте его.
Это справедливо для ведущей оси автомобиля (по умолчанию мы говорим про заднюю ось).
Для передней же оси эти тезисы могут быть верны, а могут и не быть верны, это зависит от кода игры и обрабатывается ли пятно контакта передней оси, учитывается ли размер дисков передней оси, тут лучшее решение это попробовать самому, поиграйте с настройками и вы поймете, работает ли это в вашем конкретном случае или изменения настолько незначительны, что не играют никакой роли.
С шириной покрышки все немного проще, чем шире покрышка, тем больше зацепа на оси, если вас при перекладках срывает в разворот, увеличьте ширину на задней оси, если вы наоборот хотите контролировать машину на грани фола, уменьшайте ее.
С передней осью все почти так же, однако не забывайте что на зацеп передних колес влияет еще множество настроек, а слишком широкие покрышки спереди будут мешать вам выполнять быстрые перекладки.
К примеру, я, при настройке машины практически всегда увеличиваю ширину сзади на 2-3 пункта, и уменьшаю ширину спереди на теже 2-3 пункта.
С давлением тоже все просто, чем больше давление в шине тем жестче шина реагирует на неровности, чем меньше давление тем больше пятно контакта и соотвественно зацеп.
Обычно передние шины оставляют со стандартным значением в 2-2.5 атм. (в игре 200-250кПа) или приспукают их до 1.5-1.8 атм. (150-180 кПа соответственно), задние же шины перекачивают, так они легче срываются в занос.
Помните, что не стоит все настраивать по моим усредненным примерам, каждая машины настраивается по свойму, для каждого конкретного водителя.
Например вам может быть наоборот нужен срыв передней оси, что бы уходить в занос всеми четырмя колесами, тогда имеет смысл поднадуть их.
Самая обширная и интересная тема это настройка подвески. Тут можно часами крутить ползунки в разные стороны и в итоге настроить машину так, что вы даже по прямой сможете ехать в заносе.
Именно тут истина всегда зарыта где-то рядом, для начала давайте вспомним несколько понятий, что бы нам было проще читать весь текст ниже.
Апекс
Апекс это точка на траектории движения в повороте перед который надо отпускать тормоз и после которой надо жать на газ, апекс может меняться в зависимости от вашей траектории.
Апекс может быть ранним или поздним, все зависит от того, будет ли после поворота еще поворот или вы выходите на прямую.
Хорошо видно разницу на картинке.
Эффект Аккермана
Из школьного курса физики вы должны знать или скоро узнаете что при повороте автомобиля все его колеса проходят разную дистанцию, то есть вы едете по улице и выполняете поворот на 90°, допустим вы поворачивает налево, ваше левое переднее колесо ближе к апексу, поэтому пройдет меньшую дистанцию, чем правое переднее колесо. Если бы на вашем автомобиле колеса поворачивались под одинаковым углом, вы бы раз в месяц меняли бы переднюю резину, именно эффект Аккермана позволяет вам экономить.
Если бы на вашем автомобиле колеса поворачивались под одинаковым углом, вы бы раз в месяц меняли бы переднюю резину, именно эффект Аккермана позволяет вам экономить.
Когда вы поворачиваете руль до упора, ваше левое колесо поворачивается, допустим на 55°, а вот правое колесо только на 45°, именно эта разница между углами поворота колес и называется эффектом Аккермана.
Для информации: на задней оси эффект разного расстояния для каждого колеса при повороте регулирует дифференциал.
Кастер
Кастер это угол наклона колес при повороте, проходя по улице и видя новый Мерседес вы могли заметить что его передние колеса повернуты и стоят неровно. Это сделано специально, при прохождении поворота центробежная сила несет машину на внешнюю траекторию, когда колеса находятся под углом к асфальту это позволяет частично компенсировать снос передней оси при скоростном прохождении поворота.
С терминами покончено, давайте перейдем уже к ползункам.
Первое что мы можем изменить это «размер пружины», по сути это количество витков/высота, чем больше размер, тем мягче подвеска, тем больше угол крена кузова при поворотах, однако слишком маленькие значения тоже дают отрицательный эффект.
Чем меньше размер, тем меньше ход подвески, тем больше реакция машины на неровности трассы, если выставить пружины наминимум и увеличить жесткость амортизаторов, то когда вы задним колесом заедете на бордюр, то зад подпрыгнет и вы скорее всего потеряете контроль.
Идеально это найти баланс между стандартным и минимальным значением, ведь для лучшего контроля в заносе вам нужна жесткая подвеска, однако чем жестче подвеска, тем сложнее ловить машину в заносе.
Так же мы можем менять жесткость пружин, соответственно если мы сильно повысим жесткость мы получим прыгающую подвеску, на которой нормально ездить будет нельзя. Чем жестче пружины тем сильнее машина подпрыгивает вверх на неровностях трассы.
Что бы добиться идеального поведения подвески при дрифте надо найти баланс между жесткостью пружин и мягкостью амортизаторов.
Плавно от пружин переходим к настройками амортизаторов, в игре она выражается у нас в процентах, если пружины нужны что бы подвеска шла «вверх», то амортизаторы как раз нужны что бы она шла «вниз». Но это грубо говоря. На самом деле амортизаторы отвечают за то, как быстро подвеска идет вниз, то есть проезжая неровность, у вас срабатывают и пружины и амортизаторы, если амортизаторы мягкие, вы будете как буд-то плыть по волнам, не будете чувствовать каждую кочечку, в повседневной езде это конечно удобно, но для дрифта нам нужно кое что пожестче, чем больше жесткость амортизаторов тем быстрее и четче подвеска реагирует на неровности.
Но это грубо говоря. На самом деле амортизаторы отвечают за то, как быстро подвеска идет вниз, то есть проезжая неровность, у вас срабатывают и пружины и амортизаторы, если амортизаторы мягкие, вы будете как буд-то плыть по волнам, не будете чувствовать каждую кочечку, в повседневной езде это конечно удобно, но для дрифта нам нужно кое что пожестче, чем больше жесткость амортизаторов тем быстрее и четче подвеска реагирует на неровности.
То есть, увеличивая жесткость амортизаторов мы делаем подвеску жестче.
И тут перед нами встает вопрос, если для дрифта хороша жесткая подвеска, а чего бы нам не выкрутить все на максимум?
А это вопрос контроля машины, если вы виртуоз компьютерных гонок, то такая «жесткая» настройка может и прокатить, однако чем жестче подвеска, тем чаще колеса отрываются от асфальта, тем меньше контроля за машиной в ваших руках.
Машина не должна «сидеть», подвеска должна работать, сделать полностью жесткую подвеску, это как спилить 4 витка на классике, то есть оно как-то едет, но очень не комфортно.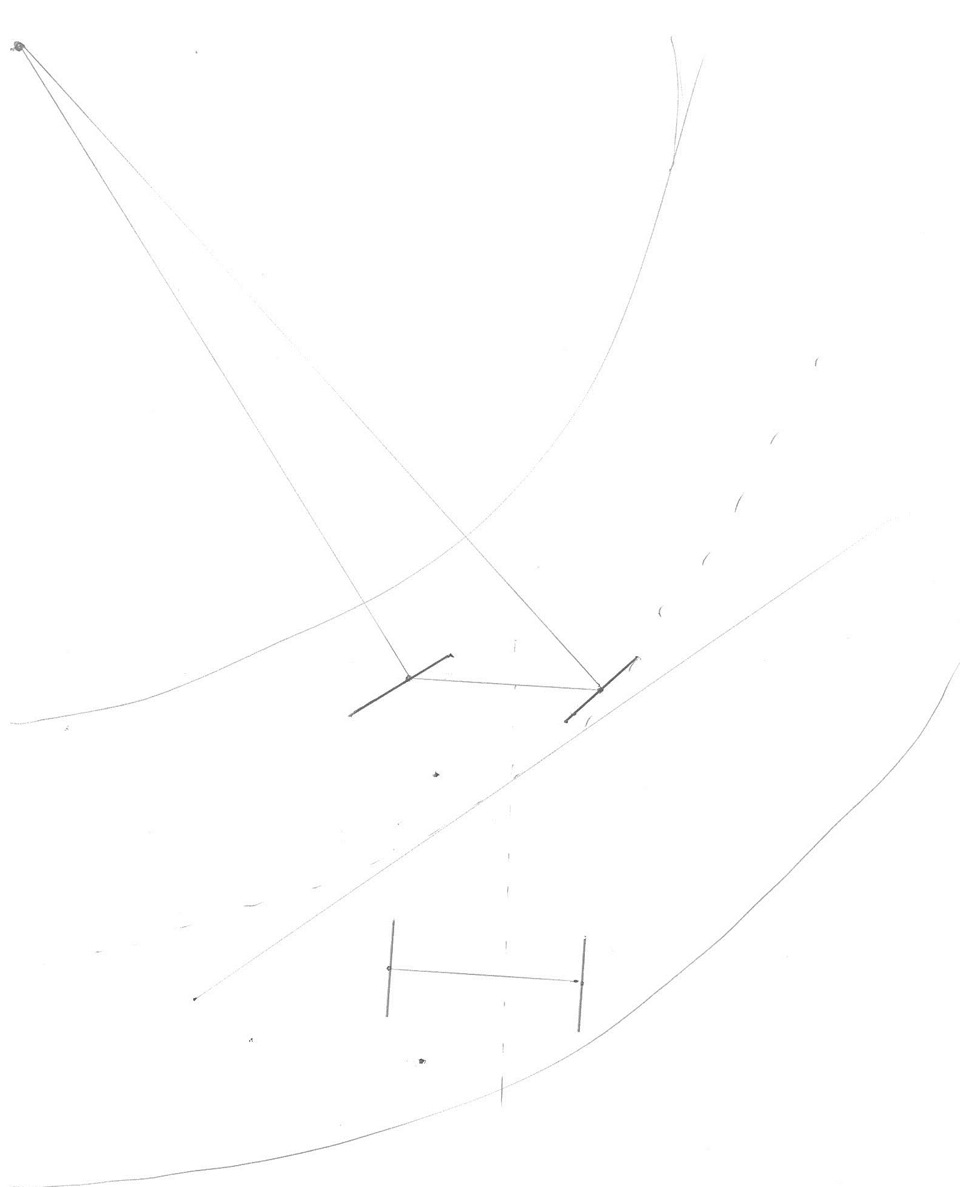 Для хорошего дрифта ищите оптимальные значения жесткости/мягкости, лично я пока езжу вообще на стандартных настройках пружин и амортизаторов, уменьшая только высоту пружин.
Для хорошего дрифта ищите оптимальные значения жесткости/мягкости, лично я пока езжу вообще на стандартных настройках пружин и амортизаторов, уменьшая только высоту пружин.
Про развал многие слышали, но слышали ли они и про схождение? На самом деле настраивать схождение стоит только если вы будете ездить тоге, при дрифте эти настройки не играют большой роли, а вот на развал стоит обратить больше внимания.
Развал передних колес еще один фактор повышающий зацеп передней оси. Рекомендую выбирать значения побольше от 6° до 10°, большой развал, так же как и эффект Аккермана позволяет уменьшать центробежную силу в поворотах, которая действует на переднюю ось.
Развал задней оси, тоже популярная тема в дрифте, ведь он так же позволяет увеличить зацеп, а баланс между скольжением и зацепом, это именно то, что мы ищем. Но тут есть и вторая сторона медали, слишком большой развал на задней оси уменьшает пятно контакта задних колес, соответственно если переборщить, то вы наоборот потеряете зацеп на задней оси. Я использую среднии значения в 4° — 6°.
Как всегда картинка для правильного представлении о чем идет речь, веселый микроавтобус поможет нам понять многое о схождении и развале.
С основами этих понятий мы разобрались в начале, теперь вас не должны пугать эти слова, итак разберемся на что же влияет каждый из них.
Кастер — увеличивает зацеп передней оси, позволяет точнее контролировать машину рулем в поворотах, рекомендую очень положительные значения от 8° и выше.
Эти настройки справедливы как для дрифта, так и для тоге, для любого привода, по скольку в игре нам не надо думать о износе резины, крутите кастер по максимуму.
Аккерман — до 11 уровня можете не заморачиваться с ним, по настоящему эта настройка будет нужна когда вы сможете настраивать выворот, вот тут нам очень пригодится регулировка угла между углами поворота колес.
В игре значение выражается в процентах, по факту для дрифта нам не нужно что бы передние колеса имели разницу в углах при повороте, поэтому угол Аккермана должен быть нулевой.
Как подсказал Nightmare59 в комментариях:
100% — отрицательный
50% — нулевой
0% — положительный
Какой выбрать вам следует подбирать самим под конкретную машину и ваш стиль вождения.
Угол выворота это угол на который можно вывернуть колесо при повороте руля, обычно это достаточно небольшие значени, типа 48° или 53°, но для дрифта это не подойдет, чем больше выворот тем больший угол заноса мы можем держать, чем больший угол заноса тем круче, значит выворот что? Правильно, должен быть больше, но максимальные значения тоже не всегда хороши, почему? Потому что чем больше угол заноса, тем больше мощности надо чтоб в этом заносе ехать, если вам не хватает мощности что бы держать угол, то уменьшайте выворот, так вы сможете больше давать на газ и показывать более красивый дрифт.
Настройка двигателя тоже интересное занятие, но для новичка куда проще чем настройка подвески. С двигателем вы будете заморачиваться намного позже, когда уже будете ставить себе в игре конкретные цели, типа всю трассу по внешке и т. п.
п.
Это мягкая настройка, которая позволяет добавить или убрать единицы лошадиных сил и момента, к примеру на Чайзере 5% форсирования дают 29 лошадей и 32 нМ момента.
Скорее эта настройка пригодится вам что бы понизить мощность двигателя, особенно актуально это для тоге или для медленного дрифта, ведь все мы знаем, иногда, что бы ехать быстрее, нужно снизить мощность.
В иных случаях можете смело крутить на максимум.
Имеется в виду крутящий момент конечно, это уже интереснее форсирования. Крутящий момент это ваша мощность, не лошадины силы, не турбина в 2 бара, все решает только крутящий момент.
Настраивать его надо совместно со следующей настройкой.
Собственно позволяет «подвинуть» отсечку выше или ниже по оборотам.
Итак вы на трассе, педаль в пол, стрелка лежит, громкие хлопки где-то сзади, долбитесь в отсечку — как говорят.
А зачем?
Максимальная мощность машины как правило лежит в 1000-1500 об/мин до отсечки, чем больше вы набираете оборотов, тем меньше мощность, для этого вы можете сдвинуть отсечку ниже, что бы не терять мощность, когда вы постоянно жмете на газ.
И тут приходит крутящий момент и говорит, а как же я? А вот его собственно можно поднять ближе к отсечке, этим вы делаете машину более гибкой, однако, если трасса медленная, много поворотов на 180°, вы просто не будете успевать достигать максимальной мощности. В этом случае как раз следует опустить крутящий момент по оборотам, да мощность падает, зато ехать удобней. 700+ лошадей для дрифта много, большинство пилотов D1GP катают на 450-500 лошадях, а уж японцы знают в этом толк.
Для тоге так же очень пригодится, ведь дело в том, что в CarX пакеты улучшений ставятся как есть, то есть вы не можете немного увеличить мощность, либо на всю катушку либо сток, а ехать тоге на S13 на ULTIMATE пакете как то не комильфо, правда. Поэтому такие вещи, которые понижают мощность авто, очень нужны.
Особо говорить не о чем, либо она есть и у вас 100+ лошадей прирост, либо ее нет. Играя в CarX я не заметил что бымашина без турбины ехала плавнее, но по сути так должо быть, турбина дает резкий рывок, когда начинает дуть, атмосферный двигатель разгоняется плавно без рывков, но повторюсь, в игре это не ощущается.
С тормозами все довольно просто, у нас для редактирования всего два параметра, усилие и процент на переднюю ось.
Чем больше момент, тем жестче тормоза, тем раньше они срабатывают. Если хотите тормозить побыстрее или используете тормоза для начала заноса, увеличивайте значение.
Если же вам наоборот надо лишь иногда подтормаживать в заносе, то попробуйте уменьшить значение, что бы торможение было более мягким.
В дрифте принято давать на заднюю ось больше тормозного усилия чем на переднюю, это нужно для того что бы заднии колеса блокировались при торможении и зад машины сносило в занос. Например при входе в поворот, вам нужно лишь чутка надовить на тормоз и вы уже в заносе.
Если же на переднюю ось будет больше тормозного усилия, то потеря сцепления будет как раз на передней оси, следовательно на входе в поворот у вас будет недостаточная поворачиваемость, а вам надо как раз наоборот, избыточную.
Как видите для дрифта эти настроки достаточно однобоки, но для тех кто любит покатать тоге тут есть простор для творчества.
У коробки передач всего два параметра для настройки, начнем с дифференциала, если вы читали часть про подвеску, то там мы упоминали эффект Аккермана, когда колеса справа и слева проходят разную дистанцию при повороте и бла бла бла, так вот для задней оси это делает дифференциал, сам по себе он не особо сложное механическое устройство.
Для дрифта могут использоваться разные типы дифференциалов, но если бы мы строили бюджетный дрифт корч, мы бы сделали что? Правильно, заварили бы дифференциал к чертям, потому что если колеса на задней оси жестко завязаны друг с другом, то в повороте внутреннее колесо будет пробуксовывать, соотвественно задня ось теряет сцепление и машину срывает в занос.
Теперь тут можно написать кучу формул и уравнений, по которым вы сможете считать коэффицент, но оно нам надо? Тем кому надо смогут сами все это найти, а я вам объясню попроще.
Для дрифта нужно что? Скольжение, скольжение достигается за счет чего? Пробуксовки задних колес (не только, но в конкретном случае). Значит нам нужно что? Что бы дифференциал не работал!
Значит нам нужно что? Что бы дифференциал не работал!
Чем выше коэффицент дифференциала тем позднее он срабатывает, соответственно нам нужно выбирать значения повыше, для каждой машины они разные.
Чем выше у вас коэффицент, тем больше задние колеса пробуксовывают.
А вот главная пара тема чуть сложнее, главная пара это вал с шестерней, которые на заднем приводе обычно стоят в дифференциале, точнее шестерня в дифференциале, а вал приходит в виде кардана, в иных случаях главная пара стоит в коробке передач.
Отношение коэффицента к единице есть отношение количества оборотов двигателя к колесу, но тут надо учитывать длину окружности колеса и прочее и прочее, сложно.
Чем выше передаточное число тем быстрее двигатель набирает обороты, тем быстрее выходит на пиковую мощность, НО скорость при это на каждой передаче падает. Соответственно падает и максимальная скорость.
Как это применять? Например вы настраиваете машину, но она не тянет у вас повороты в 150°-180°, тогда вам нужно поднять передаточное число, что бы на каждой передаче ваша максимальная скорость стала меньше, но момент при этом возрастет.
И наоборот, трассы с длинными мягкими поворотами, вы прекрасно исполняете кансай дрифт, но машине не хватает скорости и инерции чтобы пройти связку поворотов, тогда следует уменьшить передаточное число, ваша скорость на каждой передаче повысится, но момент будет меньше и сорвать машину в повер слайд будет сложнее.
После того, как Жорик Ревазов сделал из этой машины «рэт лук», эпопея с этой идеей пришла к завершению и нужно было идти и развиваться дальше. Поскольку машина дешевая и стоит копей, плюс задний привод, то было решено попробовать сделать дрифт кар.
Вся эпопея с постройкой будит разделена на 3 части.
Первая часть — подготовка машины к установке другого мотора, установка мотора, а именно 16 клапанного, плюс еще некоторые детали, про которые вы увидите в этом видео.
Вторая часть — подготовка подвески и установка навесного.  youtube.com/embed/gJYnANhsi9E»/>
youtube.com/embed/gJYnANhsi9E»/>
Третья часть — покатушки, мелкие доработки и анализ того что получилось в итоге.
Четвертая часть — по факту не несет технических особенностей. В этом видео будит установка руля меньшего размера и установка спортивного сидения. Ну и обкатка того что получилось.
Пятая часть Ставим на копейку рычаги Турбо-Тема и учимся дрифтить!
Шестая часть:
Очередное приключение Жорика и его копейки. В этой части автомобиль переведут на спирт, поменяют форсунки и вместо дросселей поставят ресивер. По мимо этого небольшой мануал по установки электроусилителя на классику.
Очередная эпопея 7 часть с копейкой. После того как в последнем видео движок стал стучать, от бурных покатушек, было решено вскрывать мотор. После вскрытия на видео вы увидите причину стука мотора, а так же работу супротека на этом моторе и много другое.
После того как в последнем видео движок стал стучать, от бурных покатушек, было решено вскрывать мотор. После вскрытия на видео вы увидите причину стука мотора, а так же работу супротека на этом моторе и много другое.
Axial Racing 1/10 EXO Terra Buggy 4WD RTR
Электрическая радиоуправляемая готовая к запуску модель
EXO 4WD TERRA BUGGY
в масштабе 1/10 от компании Axial Racing
Характеристики:
Шасси: выполнено в виде 0.16″ (4mm) пластины из алюминиевого сплава 6061 с углублениями для обеспечения низкого центра тяжести и скосами, увеличивающими дорожный просвет дополнительно на 1/2″ (13mm).
Привод: 4 ведущих колеса, подшипники в поворотных кулаках, стальные карданные валы и стальные чашки дифференциалов.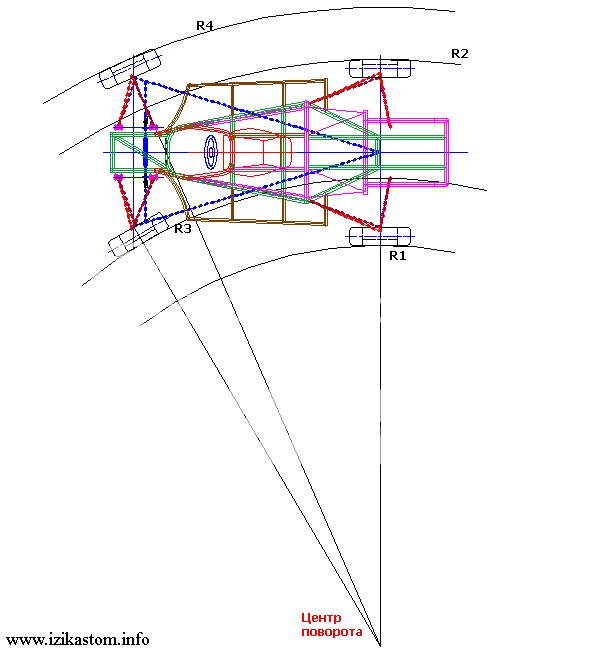
Радио: 2-канальный пистолетного типа передатчик Axial 2.4Ггц AX-3, 3-канальный приемник AR-3 2.4Ггц.
Регулятор оборотов (ESC): Castle Creations Vanguard AE-3.
Двигатель: бесколлекторный двигатель Castle Creations Vanguard 2900kV.
Моторама: из двух частей с винтом для регулировки зазора между шестернями.
Каркас: литой композитный пластик.
Ведомая шестерня (спур): 52 зуба, шаг 32.
Ведущая шестерня (пиньон): 12 зубов, шаг 32, для двигателя с валом 3 мм.
Амортизаторы: пластиковые маслонаполненные, с усовершенствованными пружинами и возможностью настройки дорожного просвета, центра тяжести и ходов подвески.
Эффект Аккермана: настраиваемый. Акерман описал эффект от внутреннего колеса, которое поворачивается быстрее, чем внешнее колесо при поворотах машины.
Акерман описал эффект от внутреннего колеса, которое поворачивается быстрее, чем внешнее колесо при поворотах машины.
Дифференциалы: три заполненных силиконовым маслом дифференциала с четырьмя металлокерамическими шестернями в компактных корпусах, позволяющих использование небольших и легких корпусов редукторов.
Крепление батареи: расположено по центру тяжести машины, размер крепления регулируется под аккумулятор.
Кузов: окрашенные с наклеенными декалями капот, боковые и верхние панели.
Бамперы: передний и задний, с алюминиевой вставкой. Установлены на вращающихся петлях, позволяющих изгибаться при ударе.
Диски: 2.2/3.0″ официально лицензированные Raceline Renegade.
Шины: официально лицензированные Hankook Dynapro МТ, передняя 1.3″(34 мм) шириной, задняя — 1.6″(41 мм) с внутренним оребрением для поперечной устойчивости.
Развал: регулируемый. Развал определяется углом между плоскостью шины и вертикалью при взгляде на машину спереди или сзади.
Гарантия: компания Axial Racing гарантирует, что этот товар не имеет дефектов материалов и сборки до начала использования. Данная гарантия не распространяется на повреждения, возникающие вследствие обычного износа, невыполнения пользователем текущего обслуживания, некорректной сборки пользователем, внесения изменений в конструкцию, установки дополнительных или опциональных деталей.
Длина: 19″ (482.6 мм)
Ширина: 11.2″ (285 мм)
Высота: 9″ (228.6 мм)
Дорожный просвет: 2″ (50 мм)
Вес (без электроники): 4.5 lbs (2.03 кг)
Комплектность: RTR EXO 4WD Terra Buggy с кузовными панелями, бамперами, дисками, шинами, поролоновыми вставками шин, ведущей (пиньон) и ведомой (спур) шестернями, цветными декалями, инструкцией-мануалом, радиоуправлением, двигателем, регулятором оборотов (ESC).
Модель поставляется в собранном виде
Необходимое оборудование:
- Аккумулятор: 6-баночный NiMH или 2-3S LiPo с разъемами Deans Ultra plug
- Зарядное устройство: совместимое с выбранным аккумулятором
- AA батареи: 4 шт. для пульта управления
- Сборка и условия для запуска
Доработка рулевого механизма — Тюнинг автомобилей
Шо это? Раньше не встречал этого понятия
Но это надо ещё понять!
Тяга Аккермана — центральная тяга системы рулевого управления, которая соединяет два рулевых рычага.
Рудольф Аккерман — это человек, который разработал систему рулевого управления для карет с конной тягой, и мы используем его имя для описания угла внутреннего колеса по отношению в внешнему колесу, когда колеса поворачиваются до упора — самого дальнего положения налево или направо. Обычно, когда передние колеса поворачиваются до упора, внутреннее колесо имеет больший угол поворота, чем внешнее колесо. Если вы продлите центральную линию каждого колеса до точки, где они пересекутся, и измерите этот угол, это и будет угол Аккермана. В идеале, для идеального управления, угол Аккермана должен пересекаться на осевой линии задней оси.
В широких поворотах, передние колеса не очень сильно поворачиваются направо или налево, внутреннее колесо не поворачивается под более крутым углом, чем внешнее колесо, и угол Аккермана не очень широкий. В крутых поворотах, внутреннее колесо поворачивается бод более крутым углом, чем внешнее колесо, и это называется «эффект Аккермана». Система рулевого управления с рычагами является приблизительным способом получения эффекта Аккермана, и она достаточна для автомоделей из-за проскальзывания колес, прогиба боковых стенок шин и других факторов.
Изменение угла Аккермана может быть выполнено с помощью изменения длины центральной тяги рулевого управления, также называемой тягой Аккермана, которая соединяет рычаги рулевого управления, или путем изменения положения крепления тяги на рычагах рулевого управления без изменения длины тяги. Большинству водителей ни к чему изменять угол Аккермана, и это лучше оставить для опытных водителей, которые желают попробовать что-нибудь новое.
Если вы желаете узнать о том, что изменяет угол Аккермана, смотрите далее:
Nitro Racer 2, Pro 2 и Pro 3 используют рычаги рулевого управления, которые имеют два набора монтажных отверстий (внутренние и внешние) для тяги Аккермана. Pro 2 и Nitro Racer 2 используют внешние отверстия, а Pro 3 использует внутренние отверстия в своих новых рычагах рулевого управления. Установка тяги Аккермана на внешние отверстия приводит в результате к небольшому углу Аккермана. Использование внутренних отверстий будет увеличивать угол Аккермана.
Небольшой угол Аккермана (осуществляется путем удлинения тяги Аккермана или путем использования внешних монтажных отвестий) обеспечит вам более агрессивный вход в поворот с возможностью наличия избыточной поворачиваемости в середине поворота, когда большая часть веса находится на внешних колесах. RS4 Pro 2 и Nitro RS4 Racer 2 используют внешние монтажные отверстия для тяги Аккермана, поэтому они обладают более агрессивной поворачиваемостю, чем другие автомодели, при одинаковых остальных параметрах (демпфирование, шины, подвеска).
RS4 Pro 2 и Nitro RS4 Racer 2 используют внешние монтажные отверстия для тяги Аккермана, поэтому они обладают более агрессивной поворачиваемостю, чем другие автомодели, при одинаковых остальных параметрах (демпфирование, шины, подвеска).
Больший угол Аккермана (осуществляется путем укорочения тяги Аккермана или использованием внутренних монтажных отверстий) обеспечит вам более предсказуемое и плавное управление. Новый RS4 Pro 3 использует внутренние монтажные отверстия для тяги Аккермана, поэтому его поворачиваемость является более предсказуемой, чем у Pro 2.
Теперь мы можем обсуждать тягу Аккермана с полной уверенностью!
Объясняя «эффект Аккермана» в Corvette Stingray 2014 года
Если вы возьмете на прогулку совершенно новый Stingray, вы можете кое-что заметить еще до того, как покинете парковку. Это мелочь может показаться дефектом, но это не так.
Это называется «эффектом Аккермана», и хотя проблема была решена 200 лет назад, Chevy оставила ее в покое на Corvette.
Причина? По той же причине у Corvette распределение веса 50/50 и рулевое управление с электроусилителем.
Объяснение эффекта Аккермана:
Не вдаваясь в подробности геометрии и математики, скажу, что эффект Аккермана — это буксование или покачивание колес при резком повороте автомобиля. Эффект создается за счет того, что внутренние и внешние колеса движутся с разной скоростью и на разные расстояния.
По сути, внешние колеса движутся дальше, создавая эффект прыжка или прыжка.
Система, запатентованная Рудольфом Аккерманом в 1818 году, поворачивала колеса под разными углами и создавала плавный поворот для четырехколесных фургонов.
В большинстве автомобилей используется система для смягчения эффекта Акерманна, однако Corvette Stingray обходится без нее.
Это удобное видео ясно объясняет эффект Аккермана:
Почему эффект Аккермана присутствует в Corvette Stingray 2014 года:
По сути, инженеры Corvette решили, что малый радиус поворота важнее, чем устранение эффекта Аккермана.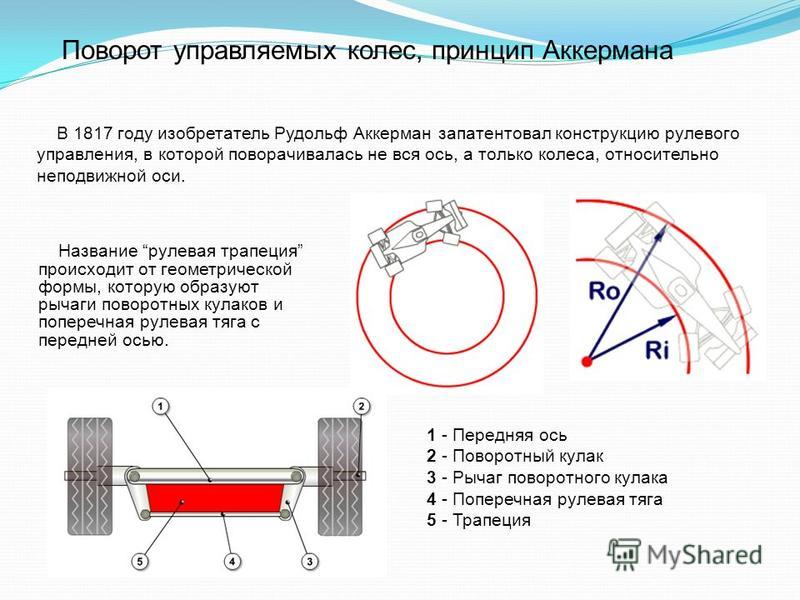
Поскольку этот эффект проявляется только во время медленных крутых поворотов, таких как навигация по парковке, Chevy оставил систему в покое, чтобы обеспечить превосходные характеристики и управляемость.
Эффект Аккермана может быть более заметен на Corvette Stingray 2014 года с твердыми 18-дюймовыми передними шинами.
Хотя проблема усугубляется холодной погодой, из-за которой шины становятся жестче, этот эффект можно по существу устранить, контролируя радиус поворота.
Итак, хотя Corvette 2014 года может быть не лучшим вариантом для медленного передвижения по стоянке, он по-прежнему остается одним из лучших автомобилей для прохождения гоночного трека или ускорения на шоссе. Не для парковок, а для улиц и трасс; и вот где он действительно выделяется!
Захватывающие машины для Cedar Rapids
Приходите и убедитесь сами: зайдите в Pat McGrath Chevyland в Сидар-Рапидс и лично посмотрите на Chevy Corvette Stingray 2014 года выпуска.
У нас есть больших запасов , которые ждут вас, так что остановитесь сегодня. Позвоните нам по телефону (319)393-3600 !
Принцип Аккермана применительно к рулевому управлению (автомобиль)
27,4.
Принцип Аккермана применительно к рулевому управлению27.4.1.
Принцип Аккермана Для достижения истинного качения четырехколесного транспортного средства, движущегося по криволинейной дороге, линии, проведенные через каждую из четырех осей колес, должны пересекаться в мгновенном центре (рис.27.23). Фактическое положение мгновенного центра постоянно изменяется из-за чередования угловых положений передних колес для корректировки траектории управляемого транспортного средства. Поскольку оба задних колеса закреплены на одной оси, но оси передних колес не зависят друг от друга, мгновенные центры лежат где-то вдоль воображаемой вытянутой линии, проведенной через ось задней оси.
Принцип Аккермана основан на том, что два передних управляемых колеса поворачиваются на концах балки моста.Оригинальная навеска Ackermann имеет параллельные рулевые тяги, так что оба управляемых колеса поворачиваются на равные углы. Следовательно, пересекающиеся линии проекции не пересекаются в одной точке (рис. 27.24.). Если оба передних колеса могут свободно следовать своим естественным путем, они сходятся и в конечном итоге пересекают друг друга. Поскольку транспортное средство движется по единой средней траектории, следы обоих колес постоянно конфликтуют друг с другом, вызывая скольжение шин и царапание протектора. В последующем модифицированном рычаге используются наклонные рычаги рулевой тяги, так что внутреннее колесо поворачивается вокруг шкворня немного больше, чем внешнее колесо.Следовательно, линии, проведенные через короткие оси, сходятся в одной точке где-то вдоль выступа задней оси (рис. 27.25).
Рис. 27.24. Поворотное рулевое управление с параллельными рычагами рулевой тяги.
Рис. 27.25. Поворотное рулевое управление с наклонными поперечными рычагами.
27.4.2.
Тяга Ackermann
Самоходная машина практически с самого начала использовала двухшарнирную систему рулевого управления.Он был изобретен для конных повозок в 1817 году Джорджем Ланкенспергером, мюнхенским строителем экипажей. В Англии Рудольф Аккерманн действовал как агент Ланкенспергера, и на его имя был получен патент на двухшарнирное рулевое устройство.
При такой компоновке рычажного механизма рычаги рулевой тяги установлены параллельно друг другу, и рулевая тяга соединяет их вместе. В прямом положении рулевого управления рычажный механизм и балка оси образуют прямоугольник, но, когда поворотные оси вращаются вокруг своих шкворней, рулевое устройство образует параллелограмм.Эта конфигурация рычажного механизма поворачивает оба колеса на одинаковую величину. На рисунке 27. 26A показано параллельное соединение, расположенное так, чтобы обеспечить поворот на 20 и 40 градусов для внутреннего и внешнего колес.
26A показано параллельное соединение, расположенное так, чтобы обеспечить поворот на 20 и 40 градусов для внутреннего и внешнего колес.
Чарльз Джантанд в 1878 году внес усовершенствование в схему рычажного механизма Аккермана, в которой наклонные рычаги поперечной рулевой тяги образуют трапецию (рис. 27.25). Эта трапециевидная конфигурация рычажного механизма позволяет внутреннему колесу поворачиваться вокруг оси шарнирного пальца на большую величину, чем внешнее колесо, что необходимо для обеспечения полупрямого качения (рис.27.26B и C). Истинное качение достигается при движении по прямой и при поворотах (блокировках) влево и вправо. Между этими тремя положениями происходит только частичное истинное качение. Степень отклонения от истинного качения и, следовательно, степень возникновения царапания шины зависит, главным образом, от отношения длины рулевой тяги к длине рычага гусеницы, а также от углового наклона или положения рычага рулевой тяги. В случае тщательного выбора размеров и настроек рулевой тяги происходит очень небольшое смещение при угле поворота примерно до 15 градусов, при превышении которого погрешность быстро увеличивается. Также отклонение рычажного механизма от теоретических истинных углов качения можно легко исправить за счет гибкости боковой стенки шины и деформации протектора, при условии, что угловая погрешность между управляемыми колесами мала. Так как задние колеса поворачиваются на меньший радиус, чем передние, при парковке легче маневрировать задним ходом, чем вперед.
Также отклонение рычажного механизма от теоретических истинных углов качения можно легко исправить за счет гибкости боковой стенки шины и деформации протектора, при условии, что угловая погрешность между управляемыми колесами мала. Так как задние колеса поворачиваются на меньший радиус, чем передние, при парковке легче маневрировать задним ходом, чем вперед.
Рис. 27.26. Геометрия рычажного механизма Аккермана.
A. Поперечно установленные рычаги рулевой тяги, внешнее колесо повернуто на 20 и 40 градусов.
B. Поперечные рычаги установлены на 10 градусов, внешнее колесо повернуто на 20 градусов.
C. Поперечные тяги установлены на 10 градусов, внешнее колесо повернуто на 40 градусов.
27.4.3.
При параллельном расположении рулевых рычагов (рис. 27.26A) размеры рулевой тяги yi, xi и y0, x0 остаются одинаковыми для всех углов поворота. При наклонных рычагах (рис. 27.26B и C) размер yi конца рулевой тяги внутреннего колеса всегда меньше, чем размер y0 внешнего колеса, при движении по кривой.С другой стороны, существует очень небольшая разница между xi и x0 для малых угловых перемещений. При малых углах поворота относительно шкворня, скажем, до 10 градусов, разница между yi и y0, а также между внутренним и внешним углами поворота колеса очень мала.
При наклонных рычагах (рис. 27.26B и C) размер yi конца рулевой тяги внутреннего колеса всегда меньше, чем размер y0 внешнего колеса, при движении по кривой.С другой стороны, существует очень небольшая разница между xi и x0 для малых угловых перемещений. При малых углах поворота относительно шкворня, скажем, до 10 градусов, разница между yi и y0, а также между внутренним и внешним углами поворота колеса очень мала.
На рис. 27.26B показано, что для рычагов рулевой тяги, выставленных на 10 градусов, если внешнее колесо повернуто на 20 градусов, то соответствующее внутреннее колесо поворачивается на 23 градуса. Аналогично для того же набора при повороте внешнего колеса на 40 градусов внутреннее колесо поворачивается на 51 градус (Рис.27,26 С). Следовательно, при заданном угловом перемещении поворотных осей рычаг поперечной рулевой тяги внутреннего колеса и поперечная рулевая тяга более эффективны, чем рычажный механизм внешнего колеса при повороте управляемого колеса. Для заданной величины поперечного перемещения рулевой тяги с наклонными рычагами рулевой тяги наименее эффективное угловое смещение оси поворотной оси происходит в зоне движения по прямой, а наиболее эффективное угловое смещение имеет место при удалении поворотных осей. из среднего положения. Таким образом, угловое движение внутреннего колеса относительно внешнего колеса становится намного больше, когда оба колеса приближаются к движению внутреннего колеса относительно внешнего колеса, становится намного больше, когда оба колеса полностью заблокированы (Рис.27,27). При использовании современных радиальных шин разница между углами поворота переднего и заднего фиксаторов иногда уменьшается.
из среднего положения. Таким образом, угловое движение внутреннего колеса относительно внешнего колеса становится намного больше, когда оба колеса приближаются к движению внутреннего колеса относительно внешнего колеса, становится намного больше, когда оба колеса полностью заблокированы (Рис.27,27). При использовании современных радиальных шин разница между углами поворота переднего и заднего фиксаторов иногда уменьшается.
Рис. 27.27. Кривые угла поворота рулевого колеса спереди и сзади.
Рис. 27.28. Диаграмма аналитического решения для связи Аккермана.
Если пренебречь небольшим наклоном рулевой тяги (рис. 27.28), перемещения M и N в направлении, параллельном балке оси PQ, можно считать одинаковыми, скажем, z.Пусть M ’, N’ обозначают правильное положение рулевого управления, а r обозначает радиус поперечины.
Пример 27.2. Гусеница имеет шкворни на расстоянии 1,37 м друг от друга, длина каждого рычага гусеницы составляет 0,18 м, а поперечная рулевая тяга находится за передней осью и имеет длину 1,27 м. Определите колесную базу, которая будет обеспечивать истинное качение всех колес при повороте автомобиля таким образом, чтобы внутренняя ось поворотного кулака находилась под углом 60 ° к центральной линии автомобиля. Может использоваться геометрическая конструкция.
Определите колесную базу, которая будет обеспечивать истинное качение всех колес при повороте автомобиля таким образом, чтобы внутренняя ось поворотного кулака находилась под углом 60 ° к центральной линии автомобиля. Может использоваться геометрическая конструкция.
Пример 27.3. Расстояние между шкворнями автомобиля — 1.3 мес. Длина гусениц составляет 0,1525 м, а длина рулевой тяги — 1,2 м. Для колеи 1,42 м и колесной базы 2,85 м найдите радиус кривизны пути, по которому проходит ближнее переднее колесо, при котором достигается правильное рулевое управление при повороте автомобиля вправо.
Рис. 27.30. Графическая диаграмма решения для связи Аккермана.
Рис. 27.31. Прогиб наружных колес для предполагаемого прогиба внутреннего колеса.
Таким образом, для графического изображения рулевого механизма на бумаге разумного размера с достаточной степенью точности можно предположить, что рулевые рычаги имеют определенную длину и образуют определенный угол с продольной осью транспортного средства.
Теперь определите графически отклонение внешнего колеса <|> для различных предполагаемых отклонений внутренних колес, скажем, 0 = 10 °, 15 °, 20 °, 25 °, 30 °, 35 °, 40 ° и 45 ° для эти рулевые рычаги, как показано на рис. 27.31.
Зная эти значения 0, соответствующие углы 9 и $ откладываются на противоположных концах линии C, как показано на рис. 27.32. Затем проводится кривая через пересечение прямых, описывающих угол 9 и
рис. 27.32. Кривая ошибки рулевого управления.
наиболее выгодный угол поворотных кулаков, т.е. a зависит от диапазона поворота внутреннего колеса.
(PDF) Влияние рулевого управления Акермана на характеристики гоночных автомобилей
12 февраля 2020 г.Оптимальное управление автомобилем формулы один с переменными параметрами. Автомобиль
Системная динамика. 2014. 52 (5): 653–678.
[20] Limebeer DJN, Перантони Г., Рао А.В. Оптимальное управление системами рекуперации энергии автомобилей формулы 1.
Международный журнал контроля. 2014. 87 (10): 2065–2080.
[21] Масуле М.И., Limebeer DJN. Оптимизация взаимодействия аэро-подвески в автомобиле формулы 1.
Транзакции IEEE по технологии систем управления. 2016 Май; 24 (3): 912–927.
[22] Тавернини Д., Веленис Э., Лот Р., Массаро М. Оптимальность техники прохождения поворотов с ручным тормозом.
Журнал динамических систем, измерений и управления. 2014; 136 (4).
[23] Тавернини Д., Массаро М., Веленис Э., Кацуракис Д., Лот Р. Минимальное время прохождения поворотов: влияние
дорожного покрытия и схемы трансмиссии автомобиля. Динамика систем автомобиля. 2013. 51 (10): 1533–1547.
Динамика систем автомобиля. 2013. 51 (10): 1533–1547.
[24] Боббо С., Коссалтер В., Массаро М., Перетто М. Применение метода оптимального маневра для
, улучшающего характеристики гоночного мотоцикла.Международный журнал SAE по легковым автомобилям-механическим
систем. 2009. 1 (1): 1311–1318.
[25] Келли Д.П. Моделирование времени круга с переходной динамикой транспортного средства и шин [диссертация]. Крэнфилд
Университет; 2008.
[26] Бертолацци Э., Бирал Ф., Да Лио М. Символьно-числовое эффективное решение задач оптимального управления для
многотельных систем. Журнал вычислительной и прикладной математики. 2006. 185 (2): 404–421.
[27] Казанова Д., Шарп Р.С., Симондс П.Минимальное время маневрирования: значимость инерции рыскания.
Динамика системы автомобиля. 2000. 34 (2): 77–115.
[28] Казанова Д. О минимальном времени маневрирования автомобиля: Теоретический оптимальный круг [диссертация].
Школа инженерии, Университет Крэнфилда; 2000.
[29] Коссалтер В., Да Лио М., Лот Р., Фаббри Л. Общий метод оценки маневренности транспортного средства —
с особым упором на мотоциклы. Системная динамика автомобиля. 1999. 31 (2): 113–135.
[30] Хендриккс Дж., Мейлинк Т., Кринс Р. Применение теории оптимального управления к инверсному моделированию управления автомобилем
. Динамика систем автомобиля. 1996. 26 (6): 449–461.
[31] BS-ISO-8855: 2011. Дорожные транспортные средства — динамика транспортного средства и курсовая устойчивость — словарь. Международная организация по стандартизации
; 2011. Стандарт.
[32] Берджесс М., Флеминг Н., Вуттон М., Уильямс С. Инструмент для быстрой разработки подвески транспортных средств. SAE
Технический документ.2004 ;.
[33] Лотус-Инжиниринг. Руководство по Lotus SHARK; 2004. Руководство по программному обеспечению.
[34] Пацейка Х., Бесселинк И. Шины и динамика транспортных средств. Elsevier Science; 2012.
[35] Паттерсон М. А., Рао А.В. GPOPS-II: программное обеспечение MATLAB для решения задач многофазного оптимального управления
А., Рао А.В. GPOPS-II: программное обеспечение MATLAB для решения задач многофазного оптимального управления
с использованием hp-адаптивных гауссовских квадратурных методов коллокации и разреженной нелинейной программы-
мин. Транзакции ACM на математическом программном обеспечении (TOMS). 2014; 41 (1): 1.
[36] Вайнштейн MJ, Рао А.В.Алгоритм 984: Adigator, набор инструментов для алгоритмического дифференцирования
математических функций в Matlab с использованием преобразования источника через перегрузку оператора. ACM Trans
Math Softw. 2017 август; 44 (2): 21: 1–21: 25.
[37] BS-ISO-4138: 2012. Легковые автомобили — установившееся круговое движение — метод испытаний с разомкнутым контуром —
ods. Международная организация по стандартизации; 2012. Стандарт.
[38] Тэнди Д.Ф., Колборн Дж., Бэ Дж. К., Коулман К., Паскарелла Р.Истинное определение и измерение
избыточной и недостаточной поворачиваемости. Международный журнал SAE по коммерческим автомобилям. 2015; 8 (2015-01-
2015; 8 (2015-01-
1592): 160–181.
18
Углы Аккермана | Карт Новости
Система рулевого управления картинга на первый взгляд кажется очень простой, но она была разработана на основе умной идеи немца Аккермана, который впервые применил ее на каретках. Проблема, которую необходимо было решить, заключалась в том, что на поворотах передних колес возникали разные траектории.Система рулевого управления с параллельными колесами означает износ шин и потерю мощности из-за скольжения протектора по асфальту.
ПОВЕДЕНИЕ КРУГЛЫХ УГЛОВ КАРТА
Система имеет два центра вращения, которые заставляют автомобиль отклоняться и заставлять колеса скользить по асфальту. Это означает, что если передние колеса параллельны, вы не получите только один теоретический центр вращения при прохождении поворотов. Создавая систему, в которой ведущие колеса не параллельны, а имеют разные углы поворота, вы получаете только теоретический центр вращения.Фактически, можно подумать, что наклон (передача веса) карты на его внешние колеса вокруг углов означает, что внутренние передние колеса разгружаются, и, таким образом, эффект скольжения ограничен. Тем не менее, большой угол кастрюли современных картов создает разницу уровней между передними колесами: внутренняя часть опускается, а другая поднимается. Таким образом, вес распределяется на оба колеса, и, более того, при прохождении медленных поворотов внутреннее переднее колесо направляет поворот и работает больше.
Тем не менее, большой угол кастрюли современных картов создает разницу уровней между передними колесами: внутренняя часть опускается, а другая поднимается. Таким образом, вес распределяется на оба колеса, и, более того, при прохождении медленных поворотов внутреннее переднее колесо направляет поворот и работает больше.
По этой причине используется система рулевого управления Ackermann (запатентованная в Лондоне 1818 г.), которая позже была повторно использована французским механиком Жанто.Эта система известна как «четырехугольная система Жанто». Вот почему рычаги шпинделя наклонены внутрь, чтобы получить другой наклон по отношению к передним колесам. Чтобы добиться большего прогресса при различных углах Аккермана, то есть для изменения разницы между двумя углами поворота внутреннего и внешнего колеса, когда область рулевого колеса соединена с двумя разными точками энергопоглощающей рулевой колонки. Таким образом, два передних колеса изменяют свой угол поворота неравномерно, чтобы соответствовать различным углам кривой пути.
Чтобы получить теоретический центр вращения с использованием углов Аккермана, свяжите угол поворота внутреннего колеса alpha с углом поворота внешнего колеса beta. Соотношение, которое связывает два угла:
cotg (альфа) — cotg (beta) = t / l
Преимущество системы Акерманна в том, что ее легко выполнять, но, с другой стороны, есть изрядное приближение. Что происходит, так это то, что углы аплха и бета не всегда дают идеальный центр вращения, и всегда существует ошибка одного из двух углов относительно значения другого.Как показано на иллюстрации, мы можем видеть, что один из углов Аккермана более выражен (открытая конвергенция), и это снижает погрешность при малых поворотах, поэтому помогает в широких углах с малым радиусом изгиба и подчеркивает отрицательную погрешность при большом изгибе. углы, то есть на острых углах.
УГЛЫ ИЗОБРАЖЕНИЯ И ДРЕЙФ ШИНЫ
Мы говорим «теоретический» центр вращения, потому что транспортное средство на самом деле не следует по пути, указанному его колесами. Явление дрейфа влияет на траекторию, по которой следует картинг, и это так, что шина при перекрестках изгибается и больше не движется в направлении, заданном ее осевым сечением, а в направлении вспашки по отношению к нему на угол эпсилон, называемый углом дрейфа. .Дрейф зависит от поперечной эластичности шины, которая из-за деформируемости обеспечивает непрерывное поперечное перемещение во время движения. До определенного значения эпсилон (в зависимости от характеристик шины, от нагрузки, действующей на колесо, и от давления в шине) существует пропорциональность между поперечной силой и углом сноса. При достижении определенного предельного значения силы угол увеличивается до тех пор, пока колеса не проскочат. Поскольку вес на передних колесах разный, угол сноса должен быть другим, но поскольку колеса прикреплены к картингу, общий угол может быть (фактически он немного больше) усреднен между значениями внутреннего и внешнего колеса.
Явление дрейфа влияет на траекторию, по которой следует картинг, и это так, что шина при перекрестках изгибается и больше не движется в направлении, заданном ее осевым сечением, а в направлении вспашки по отношению к нему на угол эпсилон, называемый углом дрейфа. .Дрейф зависит от поперечной эластичности шины, которая из-за деформируемости обеспечивает непрерывное поперечное перемещение во время движения. До определенного значения эпсилон (в зависимости от характеристик шины, от нагрузки, действующей на колесо, и от давления в шине) существует пропорциональность между поперечной силой и углом сноса. При достижении определенного предельного значения силы угол увеличивается до тех пор, пока колеса не проскочат. Поскольку вес на передних колесах разный, угол сноса должен быть другим, но поскольку колеса прикреплены к картингу, общий угол может быть (фактически он немного больше) усреднен между значениями внутреннего и внешнего колеса.
ВЛИЯНИЕ АККЕРМАННА В УГЛАХ
Угол Акерманна оказывает существенное влияние на прохождение поворотов, поскольку он подчеркивает передачу нагрузки по диагонали и увеличивает подъемную силу заднего колеса. Таким образом, есть больше точности при прохождении поворота (также быстрее). Тот же эффект достигается при выходе из поворотов с уменьшенной недостаточной поворачиваемостью, карт медленнее во второй части поворота. Угол Ackermann можно изменить, изменив схождение, но это также определяет более широкий проем передних колес и меньшую скорость на прямых.Вот почему, если конвергенция открыта вперед, начальный угол Аккермана увеличивается, и наоборот, если конвергенция стремится к закрытию. Угол Аккермана в картинге считается вариантом, который почти никогда не нужно менять, он всегда настраивается производителями так, чтобы он подходил более или менее для всех типов треков.
Таким образом, есть больше точности при прохождении поворота (также быстрее). Тот же эффект достигается при выходе из поворотов с уменьшенной недостаточной поворачиваемостью, карт медленнее во второй части поворота. Угол Ackermann можно изменить, изменив схождение, но это также определяет более широкий проем передних колес и меньшую скорость на прямых.Вот почему, если конвергенция открыта вперед, начальный угол Аккермана увеличивается, и наоборот, если конвергенция стремится к закрытию. Угол Аккермана в картинге считается вариантом, который почти никогда не нужно менять, он всегда настраивается производителями так, чтобы он подходил более или менее для всех типов треков.
Выставки — Рита Акерманн KLINE RAPE — Рита Акерманн, Рита Акерманн
Начиная с 10 ноября 2016 года, Hauser & Wirth рада представить KLINE RAPE, выставку новых картин Риты Акерманн в новом временном доме галереи на 548 West 22-я улица.На выставке будут представлены два произведения художника: «Картины на растяжках» и серия «КЛАЙН РАПС». «KLINE RAPE» также представит перформанс Иевы Мисевичюте, новую работу, созданную специально для этого места, вдохновленную картинами Аккермана. Спектакли состоятся в рамках выставки 13 и 14 января 2017 года в 18:30.
«KLINE RAPE» также представит перформанс Иевы Мисевичюте, новую работу, созданную специально для этого места, вдохновленную картинами Аккермана. Спектакли состоятся в рамках выставки 13 и 14 января 2017 года в 18:30.
Геан Морено о работе Риты Акерманн
Не существует идеального композиционного баланса или цели, которой можно было бы руководствоваться в усилиях, ни внешнего показателя, позволяющего судить об успехе работы.Только эксперименты, которые во многом связаны с кумулятивными эффектами, как с отрицательными жестами и подрывом, с нагромождением противоречивых элементов и разобщений, постепенно превращаются во что-то. Каким бы напряжением и эмоциональным зарядом ни заканчивалась работа, это неотъемлемая часть ее развития. Машина, которая безжалостно дезорганизует свои собственные формы и рвет себя от ожидания. Кажется, что ее картины могут превратиться в напряженное поле напряженности, беспрестанно разбирая любые формы и материалы, которые к ним применяются. Дизъюнкция и несоизмеримость их оживляют. Они подошли к странному порогу производства: кажется, они создают себя сами. На самом деле, каждый из них является свидетельством Аккермана цепкого догоняют их и неустанный диск произведения толкнуть, чтобы оставаться впереди тела, что делает их.
Дизъюнкция и несоизмеримость их оживляют. Они подошли к странному порогу производства: кажется, они создают себя сами. На самом деле, каждый из них является свидетельством Аккермана цепкого догоняют их и неустанный диск произведения толкнуть, чтобы оставаться впереди тела, что делает их.
Картины на растяжках Акермана получили свое название от появления рентгеновских отпечатков, которые появляются, когда отпечатки краски и пигмента становятся видимыми благодаря структурному присутствию самой картинной плоскости.Вместо того, чтобы исправлять эффект, Акерманн решил принять эту аномалию, создав серию после их недостатка. Пропорционально человеческому телу синтез таких атрибутов формирует раздробленные композиции, в результате чего фон и передний план разрушаются; картина раскрывает ровно столько, сколько скрывает. Создание полярности, заряженной оппозиционными формами; В картинах Аккермана KLINE RAPE мужественность культового экспрессионизма Франца Клайна сочетается с провокационно чувственными линиями, символизирующими универсальную женственность.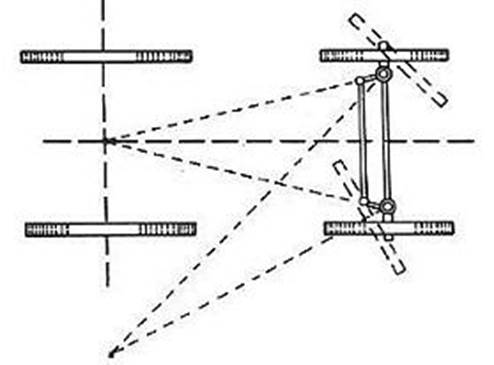 Предлагая одновременные разногласия и примирение, извилистые цвета и обширные мазки художника заключают в себе сочетание формы и аллюзии. Тем не менее изображения KLINE RAPE Аккермана сразу же читаются как повсеместно распространенные вывески.
Предлагая одновременные разногласия и примирение, извилистые цвета и обширные мазки художника заключают в себе сочетание формы и аллюзии. Тем не менее изображения KLINE RAPE Аккермана сразу же читаются как повсеместно распространенные вывески.
Университет Илона / Сегодня в Илоне / Выпускник Джефф Акерманн ’14 получает премию «Эмми» за производство новостей для телевещания
Выпускник Университета Илона 2014 года был отмечен как выдающийся продюсер новостей отделением долины Огайо Национальной академии телевизионных искусств и наук.
Если бы вы сказали Джеффу Акерманну ’14 десять лет назад, что он получит премию «Эмми», он бы вам не поверил.
Выпускник Илона Джефф Акерманн ’14 был удостоен премии «Эмми» 4 октября на виртуальной церемонии, организованной отделением долины Огайо Национальной академии телевизионных искусств и наук. Фото любезно предоставлено Аккерманом и TAP в Ливингстон «Не то чтобы я работал на этой должности ради награды, но я бы солгал, если бы сказал, что для меня не большая честь получить эту награду», — сказал Аккерманн в недавнем интервью Нажмите на Ливингстон.
Выпускник Университета Илона 2014 года недавно получил премию «Эмми» от отделения в долине Огайо Национальной академии телевизионных искусств и наук, врученную во время виртуальной церемонии 4 октября. Это была третья номинация Аккермана на премию «Эмми» и его первая победа.
Акерманн в настоящее время работает продюсером новостей на WUSA 9 в Вашингтоне, округ Колумбия, но последние два года провел в WCPO 9 в Цинциннати, создавая для станции 23:00. выпуск новостей. Аккерманн был выбран победителем в категории «Продюсер новостей» на основе трансляции его сегментов 2019 года, в том числе местного освещения массовой стрельбы в Дейтоне.
Будучи студентом Илона, Акерманн (сидит второй слева) был активным участником студенческих СМИ, выполняя различные роли в «Местных новостях Илона». Хотя специалист по тележурналистике имеет опыт работы перед камерой в качестве полевого продюсера, а также в редакции новостей в качестве ведущего, Аккерманн нашел свое истинное призвание в производстве телепрограмм.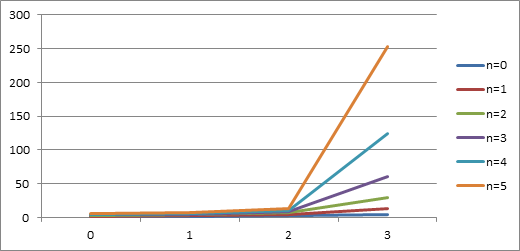
«Производство телевизионных новостей требует очень много внимания, поэтому каждый день приходится погружаться в кучу разных вещей», — сказал Акерманн TAP Ливингстону.«Вы приходите с чистым листом, а затем у вас есть восемь часов, чтобы поработать и подготовить выпуск новостей к расписанию, а затем надеяться, что все пойдет хорошо».
Всего через несколько месяцев после того, как он перешел на свою должность в Вашингтоне, пандемия коронавируса изменила количество работающих по всей стране рабочих мест, и WUSA 9 не стала исключением. Аккерманн сказал, что помимо адаптации к новой редакции, этот опыт дал ему больше уважения к местной журналистике.
«Я никогда не чувствовал, что моя работа важнее, чем сейчас», — сказал Акерманн TAP Ливингстону.«Мы живем в то время, когда факты и правда имеют значение, и люди действительно обращаются к местной журналистике, чтобы узнать то, что им нужно знать, особенно во время этой пандемии».
Рулевое управление Акермана
Как машины поворачивают на поворотах? Управляется ли автомобиль передними или задними колесами, поворачивая передние колеса. *
*
* Почему? Это проблема стабильности. Если бы они управлялись сзади, незначительные отклонения угла усилились бы положительной обратной связью, увеличивая угол еще больше.Это похоже на разницу между перетаскиванием карандаша по столу за кончик пальца или попыткой протолкнуть его пальцем сзади. |
До автомобилей у нас были экипажи, запряженные лошадьми. У них были большие открытые колеса.
Изображение: Венсон КучипудиКаретки с короткой колесной базой имели фиксированные колеса, которые полагались на проскальзывание тонких колес, чтобы компенсировать занос при буксировке лошадей, но маневренность на малых скоростях и более узких поворотах или более длинной колесной базе обеспечивалась за счет поворота передней оси. Этот первый тип простого рулевого управления часто называют «поворотным рулевым управлением». В центре передней оси находится единственный шарнир. |
 И передняя, и задняя оси прочные.
И передняя, и задняя оси прочные.При вращении передней оси геометрия регулируется так, чтобы обе оси были направлены в одну точку. Каждое колесо движется по кругу с общим центром (хотя и с разными радиусами), что устраняет необходимость в боковом скольжении или заносе.В простой каретке каждое колесо вращается независимо, и сила тяги не обеспечивается колесами, поэтому различия в окружностях компенсируются за счет того, что каждое колесо имеет немного разную скорость вращения. Если бы автомобиль двигался по илистому полю, вы могли бы увидеть четыре дуги окружности при повороте. |
Это элегантное решение для маневренности, но у него довольно много проблем: ось должна проходить большие дуги, чтобы делать повороты, и это уменьшает полезное пространство внутри колесной базы (или требует, чтобы занимаемое пространство было высоко над обе оси).Это единственная точка напряжения, затрудняющая добавление подвески, а длинная ось действует как рычаг, усиливая небольшие колебания дорожного покрытия.
Следующее решение — простое рулевое управление. Здесь каждому колесу придана собственная ось. Это решает некоторые из вышеперечисленных проблем, но мы получаем возвращение проблемы бокового скольжения. Это, безусловно, лучше, чем полностью фиксированная передняя ось, которая требует значительного бокового скольжения, но, повернув оба колеса на один и тот же угол, мы можем увидеть, что каждое из передних колес имеет другой центр вращения. При простом рулевом управлении по крайней мере одно из передних колес будет испытывать боковое скольжение. Это проблема. Если мы представим себе транспортное средство с простым рулевым управлением, которое маневрирует по гравийной дороге, на каждом повороте, независимо от скорости, передние колеса будут пробираться по гравию, оставляя неприглядные колеи, и потребуют избыточного тягового усилия для преодоления этого дополнительного трения по сравнению с простым катанием. |
Идеальное решение
Идеальным решением было бы, чтобы каждое из передних колес управлялось независимо. |
 Таким образом, каждый может быть установлен на идеальный угол, чтобы образовать касательную к дуге окружности с общим центром.
Таким образом, каждый может быть установлен на идеальный угол, чтобы образовать касательную к дуге окружности с общим центром.Когда каждое колесо движется по дуге окружности правильного радиуса, не должно быть бокового скольжения. Чтобы решить проблему, заключающуюся в том, что разные колеса с приводом работают с разной скоростью вращения, в приводной передаче обычно размещается дифференциал в оси (вероятно, это тема для будущей публикации в блоге…) |
Вот идеальная установка.Мы видим, что при повороте внутреннее колесо поворачивается на больший угол, чем внешнее.
|

Если мы предполагаем постоянную скорость (без переноса веса или внешних сил), отсутствие крена кузова или эффектов подвески, а только управление передними колесами, то мы можем использовать простую тригонометрию, чтобы найти идеальные углы для колес:
Вот эти углы, параметрически нанесенные на график. Используя некоторые примеры констант для L и T, по оси x нанесен угол внутреннего колеса, а по оси Y отложен угол внешнего колеса (оба угла нанесены в градусах), что соответствует диапазону возможных кривых. радиусы.
Красная линия показывает соотношение между двумя углами поворота колес для простого управления; здесь оба колеса вращаются параллельно, поэтому в результате получается прямая линия с единичным градиентом. Синяя линия показывает соотношение между двумя углами поворота колес для идеального управления. Чем круче поворот, тем больше отношение внутреннего угла к внешнему. |
 Для всех радиусов поворотов абсолютное значение внутреннего угла всегда выше, чем абсолютное значение внешнего угла.
Для всех радиусов поворотов абсолютное значение внутреннего угла всегда выше, чем абсолютное значение внешнего угла.Эти синие линии показывают идеальное соотношение между двумя углами, но это не простое соотношение. Задача создания механизма поворота колес таким образом — это проблема, решенная с помощью решения Аккермана.
Рулевое управление Акермана
Элегантный и простой механизм, приближающий идеальное рулевое управление, был запатентован в Англии в 1818 году Рудольфом Акерманом , и, хотя он назван в его честь, настоящим изобретателем был немецкий производитель вагонов по имени Георг Ланкенспергер , который разработал его двумя годами ранее.
В рулевом управлении Акермана каждому колесу дается собственный шарнир (который обычно расположен близко к ступице колеса). Стяжки образуют форму трапеции с двумя дополнительными шарнирами. Поскольку форма имеет форму трапеции, при вращении внутреннего колеса внешнее колесо вращается с другой скоростью. Регулируя геометрию (длину рулевых тяг и угол, который они образуют по отношению к прямой), можно настроить относительное вращение колес.Если рулевая тяга, соединяющая два колеса, имеет ту же длину, что и расстояние между двумя шарнирами, то прямоугольник, который они создают, деформируется в параллелограмм при повороте колес, и конфигурация такая же, как , простое рулевое управление , и оба колеса повернуть с той же скоростью. |

Поскольку поперечная рулевая тяга сделана короче (схождение), чем ось, внутреннее колесо поворачивается с большей скоростью по мере деформации трапеции.
Уравнения для значений углов колес на основе длин стержней и начальных углов — более сложные вычисления, чем может показаться на первый взгляд.Если вы хотите узнать больше, ознакомьтесь с конфигурациями четырех стержневых рычагов Freudenstein.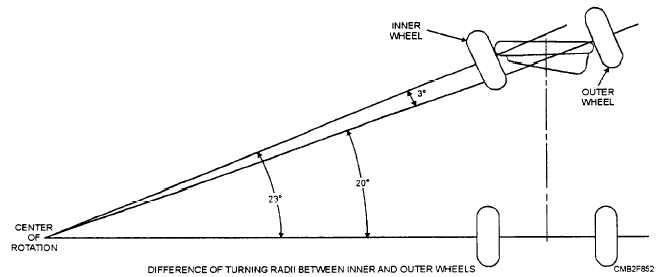 Система рулевого управления Ackerman обеспечивает лишь приблизительное решение идеального состояния рулевого управления.
Система рулевого управления Ackerman обеспечивает лишь приблизительное решение идеального состояния рулевого управления.
Слева вы можете увидеть пример того, насколько точно геометрия рулевого управления Акермана соответствует идеальному рулевому управлению. В 1878 году француз Шарль Жентод применил принцип Аккермана к своему транспортному средству с механическим приводом и обнаружил, что наилучшие результаты достигаются, когда проекции краев трапеции пересекаются над задней осью. |
Рулевое управление Ackerman решает большинство проблем рулевого управления поворотной платформой: пространство, необходимое (продольное перемещение) для каждого колеса, значительно сокращается, а рычаг момента, передающий обратные неровности дороги, уменьшается.
Для небольших входов рулевого колеса разница между углами поворота мала. По мере уменьшения радиуса необходимого поворота разница в углах увеличивается (вы могли заметить, что когда вы поворачиваете колесо автомобиля до упора, например, при парковке, разница очень заметна).
Угол скольжения
Все приведенные выше расчеты применимы к малой скорости. Однако когда нам нужно учитывать динамику транспортного средства, все становится сложнее. Когда транспортное средство движется в повороте, шина деформируется, и возникает разница между направлением движения и направлением, куда указывает шина. Это называется углом скольжения.
Профессиональные гонщики изменяют конфигурацию Ackerman своих автомобилей в соответствии с потребностями баланса. Существует предел сцепления, которое может обеспечить любая шина, и в зависимости от разницы между проскальзыванием передней или задней части автомобиля может возникнуть недостаточная или избыточная поворачиваемость.Некоторые водители даже настраивают свои автомобили с нейтральной геометрией Акермана (простое рулевое управление) или даже с геометрией анти-Акермана, чтобы уменьшить нагрев шин и снизить нагрузку на шины.
Вы можете найти полный список всех статей здесь.