Двигатель синхронный и асинхронный разница: Синхронный и асинхронный двигатель отличия | Полезные статьи
Синхронные и асинхронные электродвигатели: в чём разница?
В основе классификации электродвигателей на синхронный и асинхронный тип лежит конструкция мотора и особенности ротора. Так, синхронные функционируют на переменном источнике тока, а частота вращения ротора совпадает с частотой магнитного поля. Электродвигатели асинхронные иногда называют индукционными, и у них частота магнитного поля и вращений ротора не совпадают.
Особенности конструкции синхронных и асинхронных электродвигателей
В синхронных электродвигателях ключевые элементы — это индуктор и якорь. Индуктор располагается на роторе и имеет два полюса — постоянные магниты. Якорь находится на стартере, представлен одной или несколькими обмотками. Благодаря такой конструкции, синхронные двигатели могут функционировать как генераторы и как электродвигатели.
Главные конструктивные элементы асинхронных двигателей — магнитопровод и обмотка. Также в строении устройств есть ротор и статор, и другие элементы, влияющие на прочность и эффективность работы.
Отличия синхронного двигателя от асинхронного
Первое отличие — это соотношение частот вращения ротора с магнитным полем. В синхронных агрегатах эти показатели равные, а в асинхронных — отличаются. Второй тип, к слову, встречается гораздо чаще и имеет больше модификаций. Связано это с явными преимуществами асинхронных электродвигателей:
- невысокая стоимость;
- простота эксплуатации;
- надёжность;
- может работать без преобразователей, на собственных ресурсах сети.
Но асинхронные двигатели не лишены и недостатков:
- имеют большой пусковой ток и маленький пусковой момент;
- у них пониженный коэффициент мощности;
- низкая управляемость.
Среди достоинств синхронных устройств выделим следующие:
- стабильность вращения независимо от нагрузок на ротор;
- не сильно чувствительны к перепадам напряжения.
Недостатками синхронных двигателей можно считать сложность конструкции и пуска в ход ротора.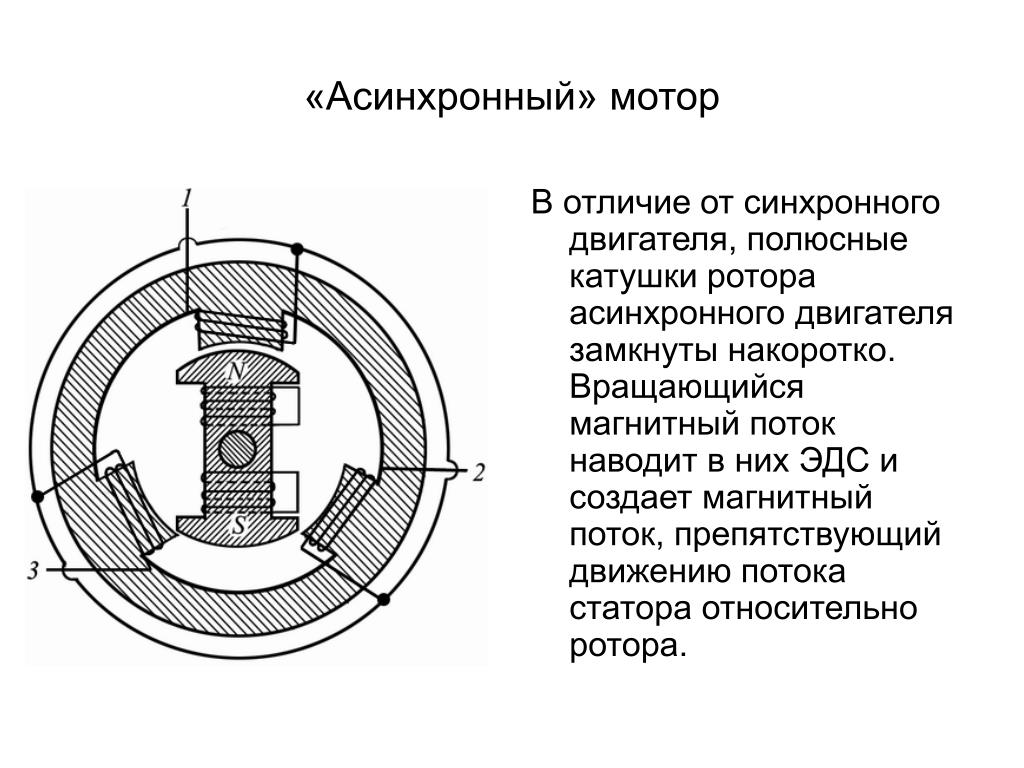
Из всего вышесказанного можно сделать вывод, что асинхронные типы целесообразно использовать для двигателей, мощностью от 100 кВт. В остальных случаях проще обойтись асинхронными агрегатами.
Разница между синхронным и асинхронным двигателем — Разница Между
Разница Между 2022
Ключевая разница: Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока. В синхронном электродвигателе вращение вала синхронизировано с
Содержание:
Ключевая разница: Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока. В синхронном электродвигателе вращение вала синхронизировано с частотой питающего тока. Асинхронный двигатель — это электродвигатель переменного тока, в котором электрический ток в роторе создается электромагнитной индукцией от магнитного поля обмотки статора. Электродвигатели переменного тока — это электродвигатели, приводимые в действие переменным током (AC). Двигатель переменного тока обычно состоит из двух основных частей: внешнего стационарного статора и внутреннего ротора. Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока.
Электродвигатели переменного тока — это электродвигатели, приводимые в действие переменным током (AC). Двигатель переменного тока обычно состоит из двух основных частей: внешнего стационарного статора и внутреннего ротора. Синхронные двигатели и асинхронные двигатели являются наиболее широко используемыми типами двигателей переменного тока.Внешний стационарный статор имеет катушки, которые питаются переменным током. Это тогда производит вращающееся магнитное поле. Внутренний ротор прикреплен к выходному валу, который создает второе вращающееся магнитное поле. Магнитное поле ротора может создаваться постоянными магнитами, магнитной индуктивностью или электрическими обмотками постоянного или переменного тока.
В синхронном электродвигателе вращение вала синхронизировано с частотой питающего тока. Период вращения точно равен целому числу циклов переменного тока. Синхронные двигатели содержат многофазные электромагниты переменного тока на статоре двигателя. Эти электромагниты создают магнитное поле, которое вращается во времени вместе с колебаниями тока в линии.
Асинхронный двигатель — это электродвигатель переменного тока, в котором электрический ток в роторе создается электромагнитной индукцией от магнитного поля обмотки статора. Асинхронный двигатель также известен как асинхронный двигатель. Ротор в асинхронном двигателе может быть намотанного или короткозамкнутого типа.
В отличие от больших синхронных двигателей, асинхронный двигатель не требует механической коммутации, раздельного возбуждения или самовозбуждения для энергии, передаваемой от статора к ротору.
Сравнение между синхронным и асинхронным двигателем:
Синхронный двигатель | Индукционный двигатель | |
Описание | Синхронный электродвигатель представляет собой электродвигатель переменного тока, в котором в установившемся режиме вращение вала синхронизировано с частотой тока питания. | Асинхронный или асинхронный двигатель представляет собой электродвигатель переменного тока, в котором электрический ток в роторе, необходимый для создания крутящего момента, получается посредством электромагнитной индукции от магнитного поля обмотки статора. |
содержать | Многофазные электромагниты переменного тока на статоре двигателя | |
Синхронная скорость | Работать на оборотах = 120f / p | Работать на скорости менее синхронной (об / мин = 120f / p — скольжение) |
Постоянное возбуждение | Синхронные двигатели требуют подачи постоянного тока на обмотки ротора | Асинхронные двигатели не требуют подачи постоянного тока на обмотки ротора. |
Источник постоянного тока | Синхронные двигатели требуют источника питания постоянного тока для возбуждения ротора. | Асинхронные двигатели не требуют источника питания постоянного тока для возбуждения ротора. |
Роторное возбуждение | Синхронные двигатели требуют контактных колец и щеток для подачи возбуждения ротора. | Асинхронные двигатели не требуют контактных колец, но некоторые асинхронные двигатели имеют их для плавного пуска или управления скоростью. |
Обмотки ротора | Синхронные двигатели требуют обмотки ротора | Асинхронные двигатели чаще всего изготавливаются с токопроводящими стержнями в роторе, которые замыкаются вместе на концах, образуя «беличную клетку». |
Пусковой механизм | Синхронные двигатели требуют запуска механизма в дополнение к режиму работы, который действует, когда они достигают синхронной скорости. | Трехфазные асинхронные двигатели могут запускаться простым подачей питания, но однофазные двигатели требуют дополнительной цепи запуска. |
Фактор силы | Коэффициент мощности синхронного двигателя можно отрегулировать так, чтобы он отставал от единицы или опережал | Асинхронные двигатели всегда должны работать с запаздывающим коэффициентом мощности. |
КПД | Синхронные двигатели обычно более эффективны, чем асинхронные двигатели. | Асинхронные двигатели, как правило, менее эффективны, чем синхронные двигатели. |
слип | Синхронные двигатели могут быть сконструированы с постоянными магнитами в роторе, исключая контактные кольца, обмотки ротора, систему возбуждения постоянного тока и возможность регулировки коэффициента мощности. | Асинхронные двигатели содержат скольжение. |
Размер | Синхронные двигатели обычно изготавливаются только с размерами, превышающими 1000 л. | Меньшие асинхронные двигатели построены и обычно в домашних условиях. |
Используется в | Применения синхронизации, такие как синхронные часы, таймеры в приборах, магнитофоны и точные сервомеханизмы | Трехфазные асинхронные двигатели с короткозамкнутым ротором широко используются в промышленных приводах, потому что они прочные, надежные и экономичные. Однофазные асинхронные двигатели широко используются для небольших нагрузок, таких как бытовая техника, например, вентиляторы. |


 с. (750 кВт), из-за их стоимости и сложности. Однако синхронные двигатели с постоянными магнитами и постоянные синхронные двигатели с электронным управлением, называемые бесщеточными двигателями постоянного тока, доступны в меньших размерах.
с. (750 кВт), из-за их стоимости и сложности. Однако синхронные двигатели с постоянными магнитами и постоянные синхронные двигатели с электронным управлением, называемые бесщеточными двигателями постоянного тока, доступны в меньших размерах.Серводвигатели – синхронные и асинхронные
Для динамичных и точных сервоприводных систем у нас тоже есть модульная система двигателей. Выберите из трех синхронных и одной асинхронной серий свой оптимальный серводвигатель: компактный, малоинерционный и мощный. Множество типоразмеров и вариантов конструктивной длины обеспечивают широкую сферу применения и надежный пусковой момент.
Множество типоразмеров и вариантов конструктивной длины обеспечивают широкую сферу применения и надежный пусковой момент.
Что такое серводвигатели?
Серводвигатель – это двигатель, который позволяет контролировать точное положение вала двигателя, а также частоту вращения и/или ускорение. Для этого применяются соответствующие датчики и способы автоматического регулирования. Раньше серводвигатели были вспомогательными приводами, которые конструировались для применения в станках. Впрочем, своим названием серводвигатель обязан латинскому слову „servus“, что по-русски означает „слуга“. В качестве серводвигателей может использоваться
Какие серводвигатели существуют?
Серводвигатели можно разделить на синхронные и асинхронные. Но это всегда привод, работающий в условиях электронного регулирования положения, скорости или момента – либо комбинации этих параметров. При этом предъявляются очень высокие требования к динамике, диапазонам регулирования и/или к точности движения. Серводвигатели обычно применяются в сочетании с системами автоматизации и управления, например в упаковочных машинах.
Но это всегда привод, работающий в условиях электронного регулирования положения, скорости или момента – либо комбинации этих параметров. При этом предъявляются очень высокие требования к динамике, диапазонам регулирования и/или к точности движения. Серводвигатели обычно применяются в сочетании с системами автоматизации и управления, например в упаковочных машинах.
Наше предложение: Синхронные и асинхронные серводвигатели
Асинхронные серводвигатели
Асинхронные серводвигатели подходят для применения в таких системах, где большие внешние моменты инерции нужно перемещать в установках и машинах, обеспечивая высокую надежность регулирования. Для этого SEW-EURODRIVE предлагает в серии двигателей DRL.. соответствующие решения для привода.
Синхронные серводвигатели
Синхронные серводвигатели – это приводы, в которых ротор с помощью закрепленных на нем постоянных магнитов синхронно приводится в движение вращающимся полем в статоре. Синхронный двигатель вращается синхронно подаваемой частоте вращающегося поля.
Синхронный двигатель вращается синхронно подаваемой частоте вращающегося поля.
Этот вариант привода работает от преобразователя частоты, который обеспечивает подходящий, управляемый трехфазный ток. Для этого в ассортименте SEW-EURODRIVE есть различные исполнения. Оптимизированные серводвигатели серии CMP.. можно в зависимости от применения адаптировать к высокой динамике или высоким нагрузкам. Классические сферы применения – пищевая промышленность, строительство, автомобилестроение, упаковочная техника и деревообработка.
Основной особенностью синхронных серводвигателей серии CM..являются оптимальные характеристики регулирования, высокий вращающий момент и динамика. Эти двигатели идеально подходят для применения в логистике, например в качестве приводов портальных подъемников или стеллажных кранов-штабелеров.
Синхронный и асинхронный двигатель: отличия, принцип работы, использование
Классификация двигателей основывается на разных параметрах. По одному из них, различают синхронный и асинхронный двигатель. Отличия приборов, общая характеристика и принцип работы описаны в статье.
По одному из них, различают синхронный и асинхронный двигатель. Отличия приборов, общая характеристика и принцип работы описаны в статье.
Синхронный двигатель
Этот тип двигателя способен работать одновременно и в качестве генератора, и как, собственно, двигатель. Его устройство сродни синхронному генератору. Характерной особенностью двигателя является неизменяемая частота роторного вращения от нагрузки.
Эти виды двигателей широко применяются во многих сферах, например, для электрических проводов, которым необходима постоянная скорость.
Принцип работы синхронного двигателя
В основу его функционирования положено взаимодействие вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Обычно якорь находится в статоре, а индуктор распологается в роторе. Для мощных моторов используются электрические магниты для полюсов, а для слабых — постоянные.
Принцип работы синхронного двигателя включает в себя (кратковременно) и асинхронный режим, который обычно применяют для разгона до необходимой (то есть номинальной) скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата. После достижения необходимой скорости индуктор начинают питать постоянным током.
В это время индукторные обмотки замыкаются накоротко или посредством реостата. После достижения необходимой скорости индуктор начинают питать постоянным током.
Преимущества и недостатки
Основными минусами этого вида двигателя являются:
- необходимость питания обмотки постоянным током;
- сложность запуска;
- скользящий контакт.
Большинство генераторов, где бы они ни использовались, являются синхронными. Преимуществами таких двигателей в целом являются:
Асинхронный двигатель
Данный вид устройста представляет механизм, направленный на трансформацию электрической энергии переменного тока в механическую. Из самого названия «асинхронный» можно сделать вывод, что речь идет о неодновременном процессе. И действительно, частота вращения магнитного поля статора здесь выше роторной всегда.
Такое устройство состоит из статора цилиндрической формы и ротора, в зависимости от вида которого асинхронные двигатели короткозамкнутые могут быть и с фазным ротором.
Принцип действия
Работа двигателя осуществляется на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе. Вращающий момент появляется тогда, когда имеется разность частоты вращения полей.
Резюмируем теперь, чем отличается синхронный двигатель от асинхронного. Чем объясняется широкое применение одного типа и ограниченное — другого?
Синхронный и асинхронный двигатель: отличия
Отличие работы двигателей — в роторе. У синхронного типа он заключается в постоянном или электрическом магните. Благодаря притягиванию разноименных полюсов вращающееся поле статора влечет и магнитный ротор. Их скорость получается одинаковой. Отсюда и название — синхронный.
В нем можно добиться, в отличие от асинхронного, даже опережения напряжения по фазам. Тогда устройство, подобно батареям конденсатора, может применяться для увеличения мощности.
Асинхронные двигатели, в свою очередь, просты и надежны, но их недостатком является трудность регулировки частоты вращения.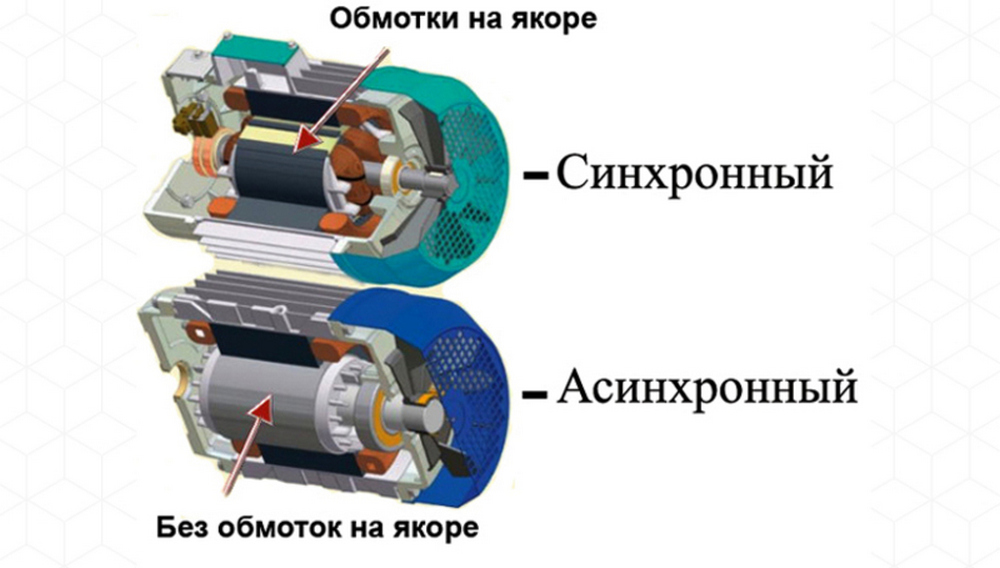 Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Если рассматривать частоту вращения, то имеют и здесь синхронный и асинхронный двигатель отличия. В синхронном типе этот показатель является постоянным, в отличие от асинхронного. Поэтому первый используют там, где необходима постоянная скорость и полная управляемость, например, в насосах, вентиляторах и компрессорах.
Выявить на том или ином устройстве наличие рассматриваемых типов приборов очень просто. На асинхронном двигателе будет не круглое число оборотов (например, девятьсот тридцать в минуту), в то время как на синхронном — круглое (например, тысяча оборотов в минуту).
И те, и другие моторы управляются достаточно сложно. Синхронный тип имеет жесткую характеристику механики: при любой меняющейся нагрузке на вал мотора частота вращения будет одной и той же. При этом нагрузка, конечно, должна меняться с учетом того, чтобы двигатель способен ее выдержать, иначе это приведет к поломке механизма.
При этом нагрузка, конечно, должна меняться с учетом того, чтобы двигатель способен ее выдержать, иначе это приведет к поломке механизма.
Так устроен синхронный и асинхронный двигатель. Отличия обоих видов обуславливают сферу их использования, когда один вид справляется с задачей оптимальным образом, для другого это будет проблематичным. В то же время можно встретить и комбинированные механизмы.
Отличия асинхронных двигателей от синхронных
Применение электродвигателей в различных отраслях промышленности и быта широко распространено, в связи с экономичностью и простотой подключения и обслуживания. Для различных механизмов, применяются двигатели разной мощности и устройства. В этой статье рассмотрим, чем отличается синхронный двигатель от асинхронного, в каких механизмах они применяются и как правильно выбрать тип электрического мотора.
Асинхронные двигатели
Как и любые электрические двигатели, асинхронные моторы представляют собой устройства, которые создают крутящий момент при помощи преобразования электрического тока. Если говорить простыми словами, асинхронный двигатель – это электромотор с неравнозначной частотой вращения ротора и магнитного поля. Магнитное поле ротора в таких устройствах всегда вращается с меньшей частотой, чем поле статора.
Если говорить простыми словами, асинхронный двигатель – это электромотор с неравнозначной частотой вращения ротора и магнитного поля. Магнитное поле ротора в таких устройствах всегда вращается с меньшей частотой, чем поле статора.
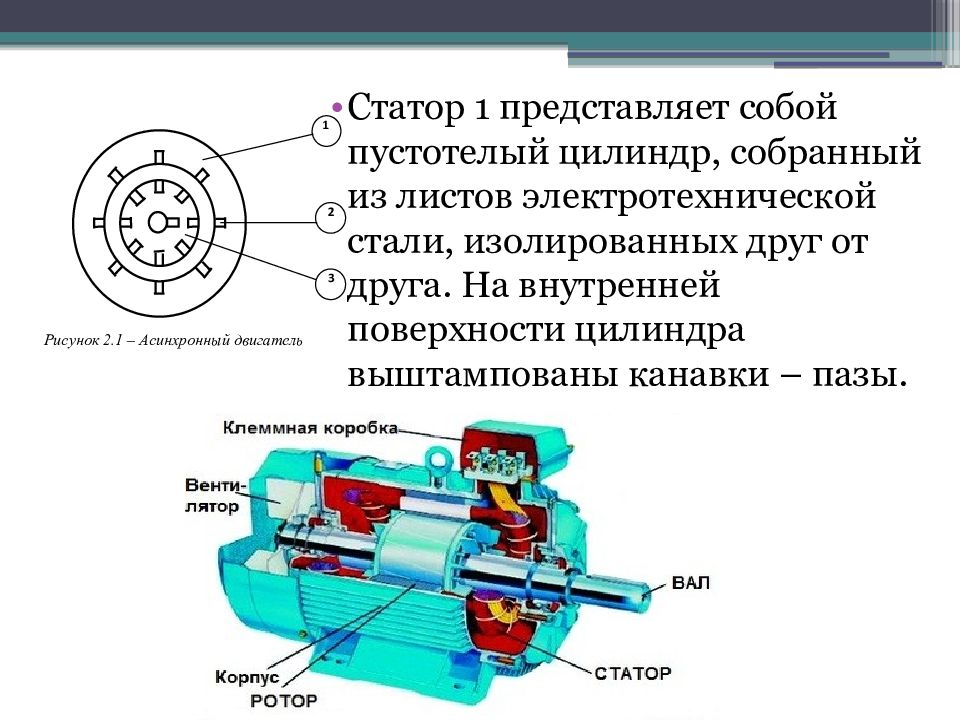
Строение асинхронного двигателя в целом аналогично с синхронным. Он состоит из:
- Цилиндрического статора из металлических пластин с пазами для обмотки;
- Фазного либо короткозамкнутого ротора;
- Подвижных и неподвижных деталей корпуса, таких как вал, подшипники, вентилятор охлаждения, электрического оборудования.
Используется тип двигателя асинхронный в различных приводах как в промышленности, так и быту. Например, для обеспечения работы конвейеров, подъемных механизмов кранов и экскаваторов, деревообрабатывающих станков и других механизмов, как крупногабаритных, так и небольших бытовых.
Обслуживание и ремонт такого типа электромоторов не требует больших затрат, однако, для трансформации крутящего момента и понижения частоты вращения необходимо использовать редуктора различной сложности, часто с большим передаточным числом.
Синхронные двигатели
Основное отличие синхронного двигателя от асинхронного в том, что частота вращения магнитных полей при его работе совпадает, то есть является синхронной. Для синхронизации частот вращения используется дополнительный источник постоянного питания, что делает конструкцию синхронного электродвигателя сложнее и частично ограничивает сферу применения такого вида машин. Кроме того, работа такого типа двигателя возможна только с использованием частотного преобразователя.
В сфере применения, электродвигатели синхронные – это промышленные моторы большой мощности, которые используются в различных промышленных устройствах и оборудовании, где необходима повышенная мощность и возникают перегрузки.
Важной особенностью такого типа электромоторов является то, что при работе с перегрузкой устройство отдает часть реактивной мощности в сеть, что способствует повышению мощности, компенсирует падение мощности.
Синхронные двигатели бывают также таких типов:
- Гистерезисные двигатели используются в точных механизмах для создания вращения.
 Например, в звукозаписи, медицинском оборудовании, машиностроении
Например, в звукозаписи, медицинском оборудовании, машиностроении - Шаговые электродвигатели применяются в точных приборах и механизмах, таких как, например, станки с числовым программным обеспечением.
 Например, в звукозаписи, медицинском оборудовании, машиностроении
Например, в звукозаписи, медицинском оборудовании, машиностроении
Преимущества и недостатки синхронных и асинхронных электродвигателей
Что бы определить, какой двигатель лучше синхронный или асинхронный, необходимо рассмотреть сферу применения этих устройств.
Асинхронные двигатели дешевле в производстве и не требуют дополнительного питания и устройства для запуска, в отличии от синхронных, поэтому, их использование более распространено. Кроме того, подключение и обслуживание таких двигателей также стоит дешевле, как и их производство.
Синхронные двигатели, кроме повышенной мощности, обладают еще одним важным преимуществом – возможностью генерации низкой частоты вращения без использования дополнительных передач в редукторах. При этом, мощность на выходном валу остается неизменной. Синхронный двигатель имеет повышенный коэффициент полезного действия, более полно трансформируя электрическую энергию в крутящий момент.
Однако, синхронные двигатели имеют и недостатки. Кроме того, что требуется дополнительное питание и оборудование запуска, в таком типе электродвигателей происходит быстрый износ подвижных токосъемных деталей, таких как щётки и контактные кольца. Для замены изношенного оборудования требуются средства, что еще более увеличивает стоимость использования синхронных моторов.
Кроме того, настройка и обслуживание синхронных двигателей имеет ряд особенностей и требует более глубоких знаний технических особенностей.
Какой тип двигателя выбрать
При выборе типа электрического двигателя следует учитывать такие факторы:
- Сферу применения и оборудование, которое приводится в движение электродвигателем;
- Стоимость оборудования и его обслуживания;
- Тип преобразующего редуктора, применяемого для понижения скорости вращения;
- Тип питания и электрической сети.
Учитывая эти факторы и принимая во внимание расчет механизма, можно подобрать тип двигателя, который будет обеспечивать бесперебойную работу устройства, максимально экономить электроэнергию и обеспечивать необходимую мощность.
При использовании любого вида электрических двигателей стоит помнить, что срок их службы зависит от соблюдение технического регламента при подключении, настройке и последующему обслуживанию такого оборудования. При нарушении технических требований электродвигатель выйдет из строя, несмотря на его преимущества и надежность.
РАЗНИЦА МЕЖДУ СИНХРОННЫМ ДВИГАТЕЛЕМ И АСИНХРОННЫМ ДВИГАТЕЛЕМ | СРАВНИТЕ РАЗНИЦУ МЕЖДУ ПОХОЖИМИ ТЕРМИНАМИ — ТЕХНОЛОГИЯ
Синхронный двигатель против асинхронного двигателя И асинхронные двигатели, и синхронные двигатели представляют собой двигатели переменного тока, используемые для преобразования электрической энерги
Синхронный двигатель против асинхронного двигателя
И асинхронные двигатели, и синхронные двигатели представляют собой двигатели переменного тока, используемые для преобразования электрической энергии в механическую.
Подробнее об асинхронных двигателях
Первые асинхронные двигатели, основанные на принципах электромагнитной индукции, независимо друг от друга изобрели Никола Тесла (в 1883 г. ) и Галилео Феррарис (в 1885 г.). Из-за своей простой конструкции и прочного использования, а также низких затрат на строительство и техническое обслуживание, асинхронные двигатели были предпочтительнее многих других двигателей переменного тока для тяжелого оборудования и машин.
) и Галилео Феррарис (в 1885 г.). Из-за своей простой конструкции и прочного использования, а также низких затрат на строительство и техническое обслуживание, асинхронные двигатели были предпочтительнее многих других двигателей переменного тока для тяжелого оборудования и машин.
Конструкция и сборка асинхронного двигателя просты. Две основные части асинхронного двигателя — это статор и ротор. Статор в асинхронном двигателе представляет собой серию концентрических магнитных полюсов (обычно электромагнитов), а ротор — серию замкнутых обмоток или алюминиевых стержней, расположенных аналогично короткозамкнутой клетке, отсюда и название ротора с короткозамкнутой клеткой. Вал для передачи создаваемого крутящего момента проходит через ось ротора. Ротор находится внутри цилиндрической полости статора, но не имеет электрического соединения с какой-либо внешней цепью. Коммутатор, щетки или другие соединительные механизмы не используются для подачи тока на ротор.
Как и любой двигатель, он использует магнитные силы для вращения ротора. Соединения в катушках статора расположены таким образом, что противоположные полюса образуются на прямо противоположной стороне катушек статора. На этапе запуска создаются периодически изменяющиеся по периметру магнитные полюса. Это создает изменение потока через обмотки ротора и индуцирует ток. Этот индуцированный ток создает магнитное поле в обмотках ротора, и взаимодействие между полем статора и индуцированным полем приводит в движение двигатель.
Соединения в катушках статора расположены таким образом, что противоположные полюса образуются на прямо противоположной стороне катушек статора. На этапе запуска создаются периодически изменяющиеся по периметру магнитные полюса. Это создает изменение потока через обмотки ротора и индуцирует ток. Этот индуцированный ток создает магнитное поле в обмотках ротора, и взаимодействие между полем статора и индуцированным полем приводит в движение двигатель.
Асинхронные двигатели предназначены для работы как с однофазным, так и с многофазным током, последний для тяжелых машин, требующих большого крутящего момента. Скорость асинхронных двигателей можно регулировать либо с помощью количества магнитных полюсов в полюсе статора, либо путем регулирования частоты входного источника питания. Скольжение, которое является мерой для определения крутящего момента двигателя, указывает на его КПД. Короткозамкнутые обмотки ротора имеют малое сопротивление, что приводит к возникновению большого тока для небольшого скольжения в роторе; следовательно, он производит большой крутящий момент.
При максимально возможных условиях нагрузки скольжение для малых двигателей составляет около 4-6% и 1,5-2% для больших двигателей, поэтому считается, что асинхронные двигатели имеют регулировку скорости и считаются двигателями с постоянной скоростью. Тем не менее, скорость вращения ротора ниже, чем частота входного источника питания.
Подробнее о синхронном двигателе
Синхронный двигатель — другой основной тип двигателя переменного тока. Синхронный двигатель предназначен для работы без разницы в скорости вращения вала и частоте переменного тока источника; период вращения является целым кратным циклам переменного тока.
Есть три основных типа синхронных двигателей; двигатели с постоянными магнитами, двигатели с гистерезисом и реактивные двигатели. Постоянные магниты из неодима-бор-железа, самария-кобальта или феррита используются в качестве постоянных магнитов на роторе. Приводы с регулируемой скоростью, в которых статор питается от переменной частоты, переменного напряжения, являются основным применением двигателей с постоянными магнитами.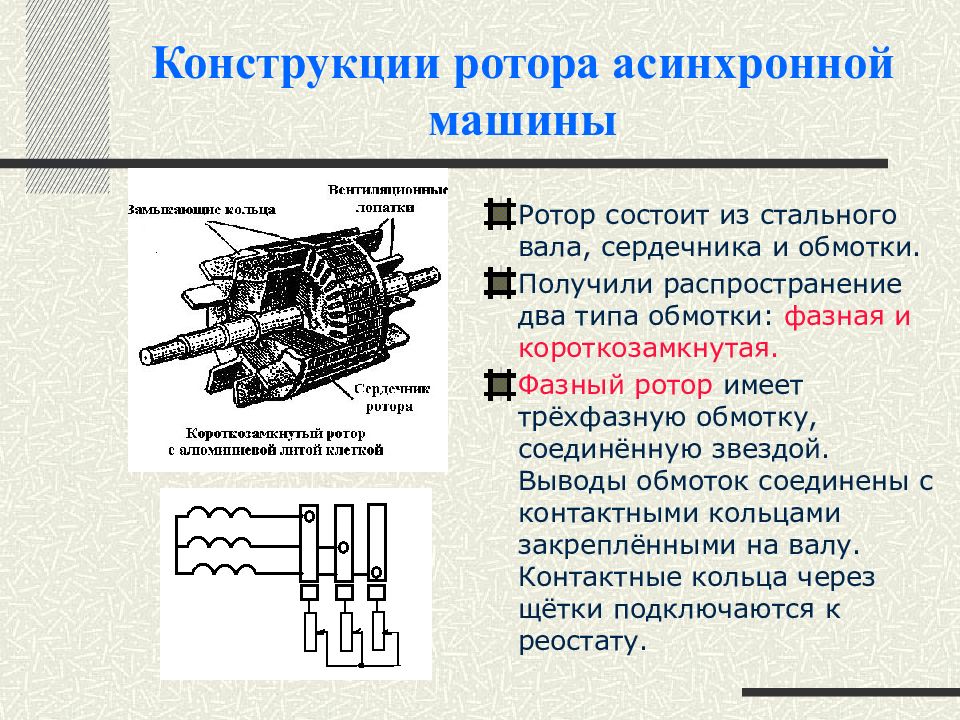 Они используются в устройствах, которым требуется точный контроль скорости и положения.
Они используются в устройствах, которым требуется точный контроль скорости и положения.
Гистерезисные двигатели имеют прочный гладкий цилиндрический ротор, отлитый из магнитной «твердой» кобальтовой стали с высокой коэрцитивной силой. Этот материал имеет широкую петлю гистерезиса, то есть, как только он намагничивается в заданном направлении, ему требуется большое обратное магнитное поле в противоположном направлении для изменения намагниченности. В результате двигатель с гистерезисом имеет угол запаздывания δ, который не зависит от скорости; он развивает постоянный крутящий момент от запуска до синхронной скорости. Таким образом, он самозапускается и для его запуска не требуется индукционная обмотка.
Асинхронный двигатель против синхронного двигателя
• Синхронные двигатели работают с синхронной скоростью (RPM = 120f / p), в то время как асинхронные двигатели работают на скорости ниже синхронной (RPM = 120f / p — скольжение), а скольжение практически равно нулю при нулевом моменте нагрузки, а скольжение увеличивается с увеличением момента нагрузки. .
.
• Синхронным двигателям требуется постоянный ток для создания поля в обмотках ротора; от асинхронных двигателей не требуется подавать ток на ротор.
• Синхронным двигателям требуются контактные кольца и щетки для подключения ротора к источнику питания. Асинхронные двигатели не требуют контактных колец.
• Синхронным двигателям требуются обмотки в роторе, в то время как асинхронные двигатели чаще всего строятся с токопроводящими шинами в роторе или используют короткозамкнутые обмотки для образования «беличьей клетки».
асинхронный, синхронный или на постоянных магнитах?
Можно ли буксировать электромобили? Зависит от типа двигателя. Да, бывают разные. Если вы только собираетесь покупать электрокар, то знайте: до полной разрядки его лучше не доводить. И вот почему
Автомобили с двигателями внутреннего сгорания допускают буксировку. Если у вас механическая коробка передач, то это самое простое дело: ставите нейтраль в коробке передач или выжимаете сцепление – и ваш мотор оказывается физически отключен от колес, а машина превращается в обычную телегу: тяни не хочу.
С автоматами чуть сложнее, в них полного разрыва связи между колесами и мотором не предусмотрено. Но и они в режиме N позволяют буксировать машину на короткие расстояния и с невысокой скоростью.
Однако в инструкциях к электромобилям вы прочтете, что буксировка или не допускается вовсе, или, как в случае с современными моделями Tesla, допускается со скоростью не более 5 км/ч на расстояние не более 10 метров: иными словами, вы в праве только оттолкать сломанную машину на обочину.
А может ли быть иначе? Да, старые модели Tesla такое позволяли. Как и GM EV1 – легенда электрокаров 90-х годов прошлого века. Так в чем же дело? В типе электрических двигателей. Или, если уж говорить совсем правильно, электрических машин, так как в электромобилях эти устройства служат не только двигателями, но и генераторами. И на современных типах электрокаров встречается три типа таких устройств. Но для начала немного истории.
В 1821 году британский ученый Майкл Фарадей в своей статье впервые описал основные принципы преобразования электроэнергии в движение. Фарадей уже знал, что электрический ток, проходя через проволоку, создает магнитное поле. Закрученный в катушку, такой провод становится электромагнитом.
Фарадей уже знал, что электрический ток, проходя через проволоку, создает магнитное поле. Закрученный в катушку, такой провод становится электромагнитом.
Он также знал, что противоположные полюса магнитов притягиваются, а одинаковые – отталкиваются. В электромагнитах же полярность зависит от направления движения тока, то есть ее можно быстро менять. И вот что придумал Фарадей. Берем магнит, который движется к другому. В последний момент полярность меняется, но рядом расположен третий магнит, к которому можно тянуться. Затем четвертый, пятый. Эти разнополярные магниты выстроены в линию. И если ее закольцевать, движение будет идти по кругу до тех пор, пока сквозь электромагниты идет ток и пока его направление не перестает меняться.
Чтобы понять, как это действует, представьте, что у вас в руках два школьных магнита в форме подковы или буквы U – помните, были такие. Если их повернуть друг к другу взаимоотталкивающимися полюсами, то они будут стремиться сделать полуоборот, чтобы снова друг к другу притянуться.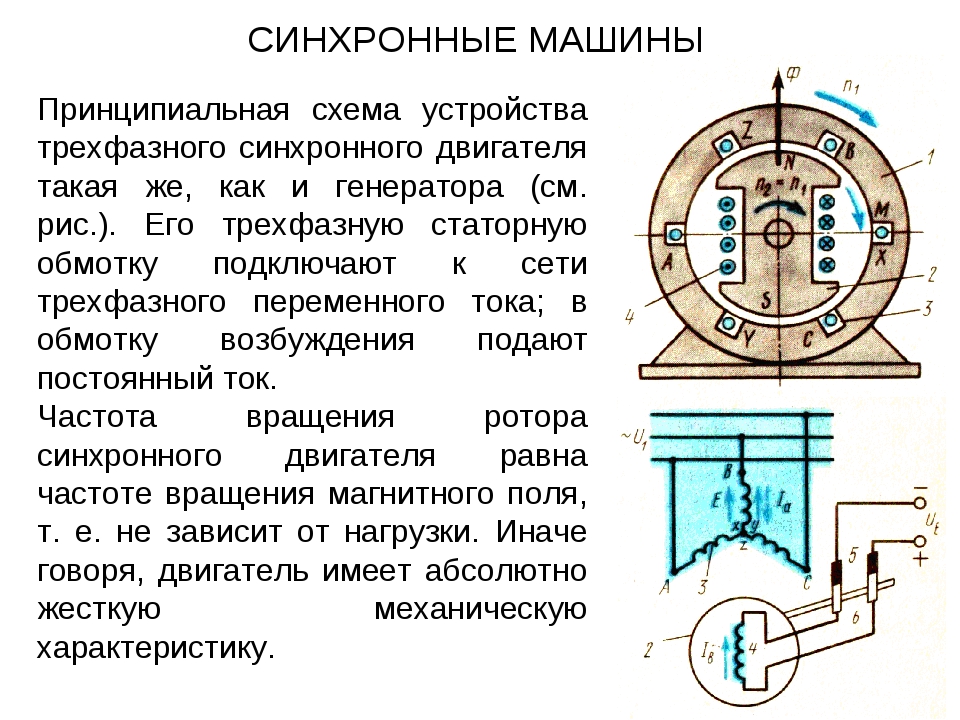 А теперь представьте, что их полюса постоянно меняются местами: тогда они станут вертеться друг относительно друга. Это и есть электродвигатель.
А теперь представьте, что их полюса постоянно меняются местами: тогда они станут вертеться друг относительно друга. Это и есть электродвигатель.
Так впервые был описан принцип действия всех электромоторов в целом и самого древнего в частности: того, который работает от постоянного тока и использует с одной стороны постоянные магниты из намагниченного сплава, а с другой – переменные электромагниты. Это наш первый герой: мотор-генератор постоянного тока на перманентных магнитах.
Изобретения Фарадея были развиты его полседователями, в частности изобретателем электрической лампочки Томасом Эдисоном. Эдисон усовершенствовал генераторы постоянного тока и стал пионером в электрификации Нью-Йорка. В 1884 году на пороге его кабинета появился молодой сербский инженер. Звали иммигранта Никола Тесла.
Тесла предложил улучшить конструкцию Эдисона и попросил за работу 50 тысяч долларов – баснословная в те времена сумма. По легенде Эдисон согласился, но когда Тесла действительно существенно улучшил существующую модель, любимец Америки просто кинул безвестного сербского эмигранта.
Тесла рассердился и отправился к главному конкуренту, адепту переменного тока Джорджу Вестингаузу. Так началась «Война токов», окончательно проигранная постоянным током только в 2007 году, когда Нью-Йорк последним из городов перешел на ток переменный.
Генераторы Эдисона вырабатывали электричество с напряжением, близким к потребительскому: 100-200 вольт. Это удобно для домов, но его сложно передавать на большие расстояния из-за сопротивления проводов. Тут было два решения: увеличивать диаметр кабелей или повышать напряжение. Первый вариант позволял делать линии длинной 1,5 километра. Да, совсем немного. Второй вариант был невозможен из-за отсутствия в те годы эффективных способов повышения напряжения постоянного тока.
Однако еще в 1876 году русский ученый Павел Яблочков изобрел трансформатор, меняющий напряжение переменного тока. Подача энергии на большие расстояния перестала быть проблемой.
Но была другая проблема. Лампочкам Эдисона все равно от какого тока питаться: постоянного или переменного. А вот с электродвигателями сложнее: они в те годы требовали только постоянного. В 1888 году Тесла запатентовал в США асинхронный электрический двигатель переменного тока. Он же изобрел и синхронный генератор, впоследствии использованный и как двигатель. Это второй и третий герои нашей статьи.
А вот с электродвигателями сложнее: они в те годы требовали только постоянного. В 1888 году Тесла запатентовал в США асинхронный электрический двигатель переменного тока. Он же изобрел и синхронный генератор, впоследствии использованный и как двигатель. Это второй и третий герои нашей статьи.
Так поговорим же о них поподробнее
Если в детстве вам доводилось разбирать игрушечные электрические машинки, то вы должны помнить устройство их простейших двигателей. Для остальных напомним. Все применяемые в электромобилях моторы состоят из двух частей: неподвижного статора и вращающегося ротора.
В игрушечных машинах на статоре стоят постоянные магниты, а на роторе – электрические переменные. При вращении на них через специальные щетки подается постоянный ток от батареек, и их последовательное включение и обеспечивает движение.
Похожая конструкция встречается практически у всех электромобилей. С одним отличием: на роторе там стоят постоянные магниты, а на статоре, напротив, электрические и переменные. Так в том числе можно избавиться от щеток: одного из немногих элементов электродвигателя, который подвержен износу.
Так в том числе можно избавиться от щеток: одного из немногих элементов электродвигателя, который подвержен износу.
Преимущество моторов на постоянных машинах в том, что они легкие, компактные, мощные, эффективные, работают от вырабатываемого аккумуляторами постоянного тока… так, стоп! А какие недостатки?
Недостаток прост. Таким моторам не хватает тяги. Так перейдем же к асинхронным инверсионным моторам переменного тока.
Бородатый анекдот про умирающего мастера заваривать чай, который делился своим секретом словами «не жалейте заварки» – это прям притча про компанию Tesla. Вопреки расхожему мнению, ее основал не Илон Маск (он позже стал главным инвестором и владельцем), а Мартин Эберхард и его партнер Марк Тарпенинг.
Эти двое придумали немыслимое. Создать не тихоходный, эффективный и относительно дешевый электрокар, а дорогой, быстрый и клевый. Маск же первым идею оценил и быстро прибрал ее к рукам.
Имя компании Tesla не случайно. Одной из ее технических революций стало использование асинхронного двигателя без постоянных магнитов, работающего на переменном токе – того самого, который изобрел Никола Тесла. Эта конструкция дороже как сама по себе, так и благодаря необходимости в установке преобразователя постоянного тока от батареи в переменный для электродвигателя. Успешное решение данной задачи и стало первым из множества теперь уже легендарных прорывов «Теслы».
Эта конструкция дороже как сама по себе, так и благодаря необходимости в установке преобразователя постоянного тока от батареи в переменный для электродвигателя. Успешное решение данной задачи и стало первым из множества теперь уже легендарных прорывов «Теслы».
Благодаря мощному асинхронному мотору электрокары Tesla с самого начала были очень динамичным, что стало ключевой причиной роста их популярности. В таком моторе переменный ток в обмотке статора создает вращающееся магнитное поле. Оно вызывает индукцию в роторе, заставляя его вращаться чуть медленнее, чем вращение самого поля – поэтому двигатель и называется асинхронным. Если скорости вращения синхронизируются, поле перестает создавать в роторе индукцию, и он начинает замедляться, рассинхронизируясь обратно. Важно заметить, что собственно на ротор никакого электричества напрямую не подается.
Итак, есть еще третий тип электрического двигателя, который встречается в современных электромобилях: синхронный на электромагнитах. Он похож по устройству на двигатели с постоянными магнитами на роторе, только эти магниты – электрические. На них подается постоянный ток, так что полярность магнитов ротора остается неизменной. А вот полярность магнитов статора, напротив, меняется, что и обеспечивает вращение.
Он похож по устройству на двигатели с постоянными магнитами на роторе, только эти магниты – электрические. На них подается постоянный ток, так что полярность магнитов ротора остается неизменной. А вот полярность магнитов статора, напротив, меняется, что и обеспечивает вращение.
Такие синхронные моторы на электромагнитах славятся своей способностью обеспечивать стабильность оборотов и ставятся, обычно, на всякие установки вроде насосов. А еще… на электрокар Renault Zoe. Зачем? Честно сказать, найти быстрый ответ на этот вопрос не получилось. Можем лишь предположить, что это связано с лучшей способностью такого двигателя служить генератором, рекуперируя энергию торможения. Мотор на Zoe не самый мощный, а мощным генератором он быть обязан.
Так что же лучше? Большинство автоконцернов выбирает моторы на постоянных магнитах: они эффективнее. Tesla в первые годы настаивала на асинхронных моторах. Но потом… сделала ставку на двух моторную полнопривродную схему, в которой асинхронный мотор обеспечивает динамику, а двигатель на постоянных магнитах гарантирует низкий расход энергии при небольших нагрузках. И только Renault… ну вы поняли.
И только Renault… ну вы поняли.
А теперь о том, что ждет нас дальше. При буксировке даже обесточенный двигатель на постоянных магнитах тут же начинает работать как генератор, что чревато перегревом и возгоранием энергосистемы электромобиля. В синхронных моторах Renault оставшейся магнетизм в роторе также способен вызвать индукцию в катушках статора, ну и пошло поехало – генерация тока, перегрев, пожар.
И только асинхронные двигатели, когда их статоры не под напряжением, не являются генераторами: их можно буксировать.
Так вот, современная тенденция такова. Моторы на постоянных магнитах становятся все мощнее и тяговитее, оставаясь самыми эффективными. Производители постепенно переходят на них. Но придумать, как машины с ними безопасно буксировать инженерам еще предстоит. Пока они декларируют принцип «Наши электромобили не ломаются и в буксировке не нуждаются». Но звучит не больно убедительно.
Основное различие между синхронным и асинхронным двигателем
В чем разница между синхронным и асинхронным двигателем (асинхронным двигателем) Электродвигатели — это машины, преобразующие электрическую энергию в механическую для выполнения механических операций. Эти двигатели могут быть рассчитаны на работу с переменным током (AC) или постоянным током (DC). Двигатели переменного тока делятся на два типа; Синхронные двигатели и асинхронные двигатели.Оба они имеют некоторое сходство, например, в своей конструкции, но они совершенно разные в работе и своих характеристиках.
Эти двигатели могут быть рассчитаны на работу с переменным током (AC) или постоянным током (DC). Двигатели переменного тока делятся на два типа; Синхронные двигатели и асинхронные двигатели.Оба они имеют некоторое сходство, например, в своей конструкции, но они совершенно разные в работе и своих характеристиках.
Прежде чем перейти к списку различий между синхронным двигателем и асинхронным двигателем, мы собираемся обсудить их основы и принцип их работы. Для ясного объяснения вы можете знать разницу между однофазным и трехфазным источником питания, связанную с работой однофазных и трехфазных двигателей переменного тока.
Как работает двигатель переменного тока? Как мы знаем из нашей предыдущей статьи «Различия между двигателями переменного и постоянного тока», двигатели постоянного тока работают по принципу действия магнитного поля на проводник с током, который испытывает механическую силу.Где статор создает статическое магнитное поле, а ротор, состоящий из нескольких обмоток, несет входной постоянный ток.
В двигателях переменного тока используется идея RMF вращательного магнитного поля. Статор состоит из нескольких обмоток, которые создают переменное магнитное поле при подаче на вход переменного тока. Это магнитное поле вращается вокруг ротора.
Ротор, состоящий из обмоток или проводников с замкнутым контуром, пропускает ток либо за счет индукции, либо от внешнего источника тока, создающего собственное магнитное поле.Магнитное поле, создаваемое ротором, взаимодействует с вращающимся магнитным полем и начинает вращаться в его направлении.
Относительная разница между полем вращения статора и скоростью вращения ротора называется скольжением. если скольжение двигателя равно нулю или ротор имеет ту же скорость вращения, что и поле вращения статора, двигатель называется синхронным двигателем переменного тока. если двигатель переменного тока имеет скольжение или существует разница между скоростью вращения поля статора и ротора, двигатель называется асинхронным двигателем. Чтобы узнать больше о различных типах двигателей, обратитесь к предыдущим сообщениям о двигателе BLDC (бесщеточный двигатель постоянного тока), шаговых двигателях и серводвигателях.
Чтобы узнать больше о различных типах двигателей, обратитесь к предыдущим сообщениям о двигателе BLDC (бесщеточный двигатель постоянного тока), шаговых двигателях и серводвигателях.
Похожие сообщения:
Синхронный двигательКак следует из названия, синхронный двигатель имеет ротор, который предназначен для вращения с той же скоростью, что и его статор, вращающий магнитное поле, называемое синхронной скоростью .
Статор создает вращающееся магнитное поле при подаче переменного тока.Ротор может быть спроектирован так, чтобы генерировать собственное магнитное поле с использованием внешнего источника постоянного тока через токосъемные кольца или постоянного магнита .
Ротор предназначен для создания магнитных полюсов, равных или кратных полюсам статора. Когда статор и ротор находятся под напряжением, магнитное поле ротора блокируется вращательным магнитным полем статора, и он вращается с точной скоростью поля статора.
Из-за инерции синхронный двигатель не сразу запускается на синхронной скорости (вращательное магнитное поле).Поэтому для обеспечения пускового крутящего момента используется дополнительная обмотка под названием « демпферная обмотка ». Он действует как асинхронный двигатель во время запуска. Таким образом, это говорит о том, что синхронные двигатели не являются самозапускающимися , им нужен дополнительный пусковой механизм.
Это может быть двигатель с независимым или невозбужденным возбуждением, т.е. первый требует отдельного источника постоянного тока, питает обмотки ротора и создает магнитное поле, а второй описывает синхронный двигатель, ротор которого предназначен для намагничивания вращающимся магнитным полем статора и вращается вместе с ним.
Ротор синхронного двигателя вращается с синхронной скоростью, которая зависит от частоты сети и полюсов обмоток статора. Следовательно, скорость двигателя не зависит от нагрузки. Чтобы изменить скорость синхронного двигателя, необходимо изменить частоту питания. Это достигается с помощью VFD (частотно-регулируемый привод).
Это достигается с помощью VFD (частотно-регулируемый привод).
Похожие сообщения:
Асинхронный двигательНазвание асинхронного двигателя предполагает, что скорость вращения ротора асинхронна со скоростью вращения магнитного поля статора.Точнее, ротор асинхронного двигателя вращается с относительно меньшей скоростью, чем статор RMF. Это связано с наличием проскальзывания между скоростью вращения его статора и ротора.
Ротор асинхронного двигателя представляет собой либо короткозамкнутый ротор с обмоткой. Ротор с короткозамкнутым ротором состоит из тяжелых медных стержней, соединенных на концах с помощью проводящего кольца, которое электрически замыкает их друг на друга. Ротор витого типа состоит из нескольких обмоток поверх стального многослойного сердечника.
Вращающееся магнитное поле статора вызывает индукционный ток в роторе. Этот индуцированный ток течет внутри ротора, создавая собственное магнитное поле. Согласно закону Ленца, это поле ротора противодействует причине, которая его создает, и пытается устранить ее, догоняя скорость RMF статора (синхронная скорость).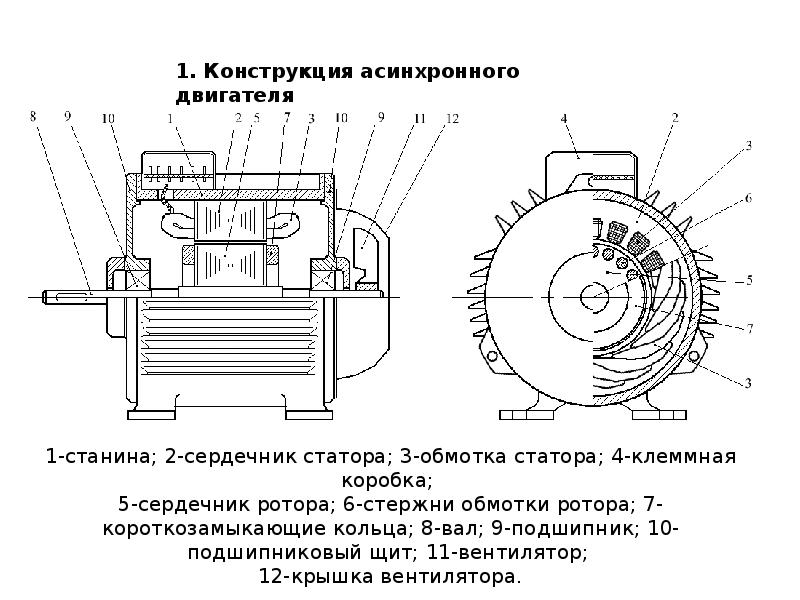 При этом ротор вращается в направлении RMF статора. Поскольку он работает по принципу индукции, поэтому асинхронный двигатель также известен как асинхронный двигатель .
При этом ротор вращается в направлении RMF статора. Поскольку он работает по принципу индукции, поэтому асинхронный двигатель также известен как асинхронный двигатель .
Асинхронный двигатель никогда не может работать на синхронной скорости, он всегда медленнее синхронной скорости и зависит от скольжения двигателя. Причина в том, что индуцированный ток в роторе генерируется из-за разницы между полем статора и ротора. если, в случае, если он работает на синхронной скорости, это означает, что ротор магнитно заблокирован, и между статором и полем ротора нет разницы. Следовательно, не было бы магнитного потока, индуцирующего ток в роторе.Магнитный поток необходим для асинхронного двигателя, поэтому он должен работать на более низкой скорости, чем его синхронная скорость.
Ротор с короткозамкнутым ротором имеет более простую конструкцию и позволяет индуцированному току протекать через медные стержни. В то время как ротор с обмоткой позволяет пользователю изменять ток ротора во время его запуска, как это используется в «Моторном пускателе». Смысл в том, чтобы безопасно запустить двигатель, уменьшив огромный пусковой ток, потребляемый асинхронным двигателем. Обычно это делается путем последовательного включения переменного резистора с обмотками ротора через токосъемные кольца.
Смысл в том, чтобы безопасно запустить двигатель, уменьшив огромный пусковой ток, потребляемый асинхронным двигателем. Обычно это делается путем последовательного включения переменного резистора с обмотками ротора через токосъемные кольца.
Скорость асинхронного двигателя зависит от скольжения двигателя, которое зависит от нагрузки и сопротивления ротора. Другими словами, скорость асинхронного двигателя может изменяться в зависимости от нагрузки или за счет изменения сопротивления ротора.
Связанная запись:
Различия между синхронным двигателем и асинхронным двигателемВ следующей таблице показаны основные различия между синхронным двигателем и асинхронным (асинхронным) двигателем.
| Синхронный двигатель | Асинхронный двигатель |
Синхронный двигатель представляет собой тип двигателя переменного тока, который работает с синхронной скоростью. | Асинхронный двигатель — это двигатель переменного тока, который работает на скорости ниже синхронной. |
| Работает по принципу магнитной блокировки между полем ротора и статора. | Работает по принципу электромагнитной индукции между статором и ротором. |
| Скольжение отсутствует т.е. скольжение синхронного двигателя равно 0. | В асинхронном двигателе имеется скольжение, и оно всегда больше 0. |
| Скорость двигателя зависит от частоты сети и количества полюсов статора. Н с = 120 ф / Р | Скорость двигателя зависит от нагрузки, сопротивления ротора и скольжения, с. она всегда меньше синхронной скорости. N = N с (1-с) N < N с |
| Скорость не меняется при изменении нагрузки, подключенной к двигателю. | Скорость меняется в зависимости от нагрузки двигателя. |
| Это не самозапуск и требует дополнительных обмоток для запуска двигателя. | Асинхронные двигатели запускаются самостоятельно и не требуют дополнительного механизма. |
| Для ротора требуется дополнительный источник тока. | Ротор асинхронного двигателя не требует дополнительного питания. |
| Синхронный двигатель с независимым возбуждением требует дополнительного источника постоянного тока для питания обмотки ротора. | Не требует дополнительного источника. |
| Также необходимы контактные кольца и щетки для подачи постоянного тока на обмотки ротора. | Не требует токосъемных колец, однако в витом типе можно использовать токосъемные кольца для контроля скорости. |
| Скорость двигателя регулируется только путем изменения частоты питания через ЧРП. | Скорость двигателя можно регулировать с помощью переменного сопротивления ротора, а также устройств ЧРП.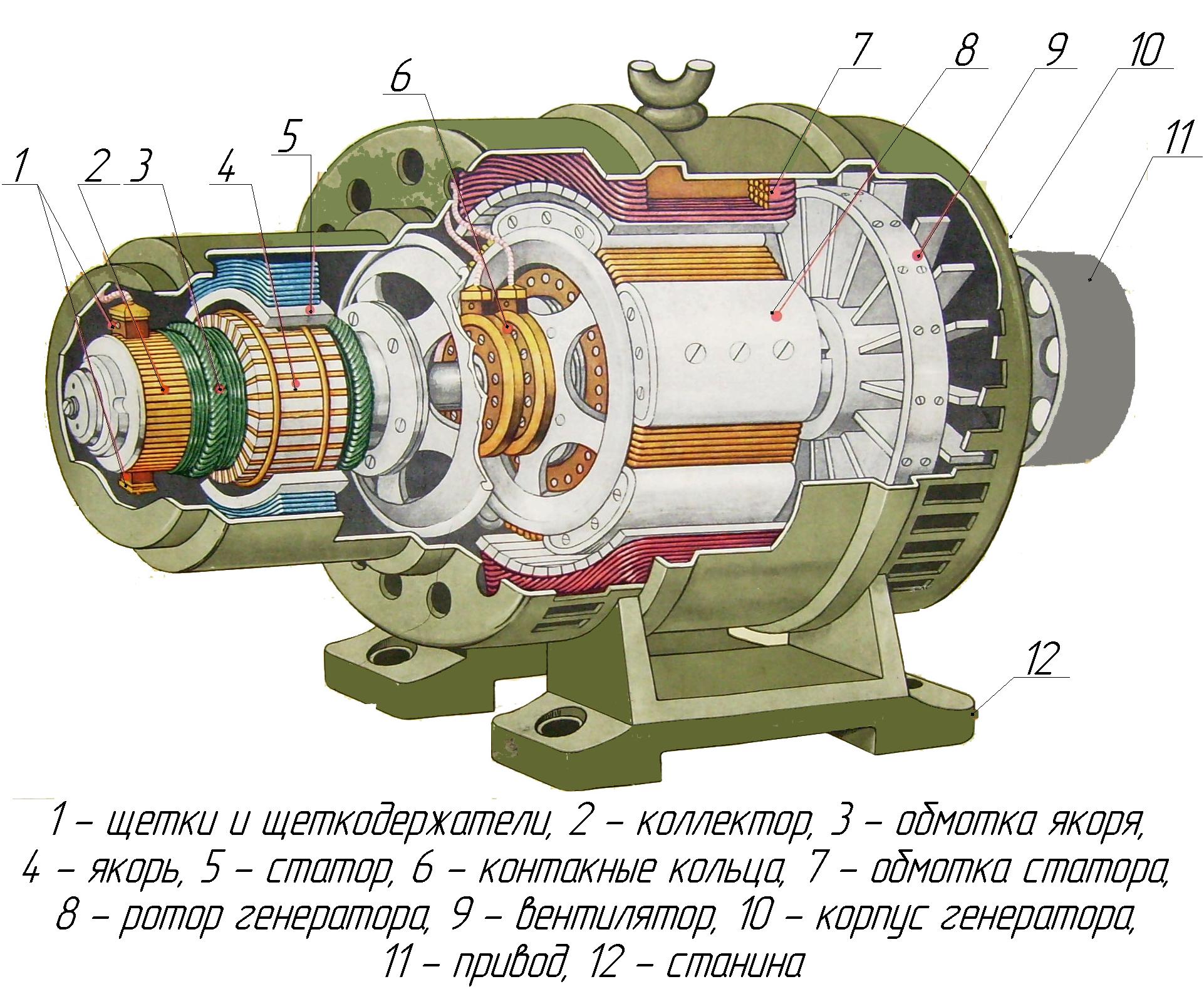 |
| Подача входного напряжения не влияет на скорость или крутящий момент синхронного двигателя. | Подача входного напряжения может использоваться для изменения крутящего момента и скорости двигателя. |
| Колебания сетевого напряжения не влияют на работу синхронного двигателя. | Колебания сетевого напряжения влияют на его скорость и работу. |
| Первоначальная стоимость выше, чем у асинхронного двигателя. | Асинхронные двигатели дешевле. |
| Это операция сложная. | Это операция проста и удобна для пользователя. |
| If обеспечивает высокую эффективность и точность. | Они не так эффективны, как синхронный двигатель. |
| Может легко работать на очень низкой скорости с помощью ЧРП. | Довольно сложно работать на низкой скорости. |
| Лучше всего работает при низкой скорости, обычно ниже 300 об/мин. | Лучше всего подходит для работы на скорости выше 600 об/мин. |
| Может работать с отстающим, опережающим или единичным коэффициентом мощности путем регулировки возбуждения. | Асинхронный или асинхронный двигатель всегда работает с отстающим коэффициентом мощности. |
| Он также может одновременно использоваться для коррекции коэффициента мощности, используя его в опережающем коэффициенте мощности. | Его нельзя использовать для коррекции коэффициента мощности, а только для управления механическими нагрузками. |
| Поскольку он работает с постоянной скоростью, внезапные изменения нагрузки вызовут колебания потребляемого тока. | В асинхронном двигателе такого явления нет. |
Вывод этой статьи состоит в том, что синхронные двигатели эффективны, но дороже и используются для приложений со сверхнизкими оборотами, предлагая функцию коррекции коэффициента мощности.С другой стороны, асинхронные двигатели используются для высоких оборотов с переменной скоростью, они недороги и просты в эксплуатации.
Связанный пост об электрических двигателях.
Разница между синхронным двигателем и асинхронным двигателем
Электродвигатели переменного тока можно разделить на две основные категории: (i) Синхронный двигатель и (ii) Асинхронный двигатель . Асинхронный двигатель обычно называют асинхронным двигателем. Оба типа сильно отличаются друг от друга.Основные различия между синхронным двигателем и асинхронным двигателем обсуждаются ниже.Конструктивное отличие
- Синхронный двигатель : Статор имеет осевые пазы, которые состоят из обмотки статора, намотанной на определенное количество полюсов. Как правило, используется ротор с явно выраженными полюсами, на котором установлена обмотка ротора. Обмотка ротора питается от источника постоянного тока с помощью контактных колец. Можно также использовать ротор с постоянными магнитами.
Синхронный двигатель - Асинхронный двигатель : Обмотка статора аналогична обмотке синхронного двигателя. Наматывается на определенное количество полюсов. Можно использовать ротор с короткозамкнутым ротором или ротор с обмоткой. В роторе с короткозамкнутым ротором стержни ротора постоянно замкнуты накоротко концевыми кольцами. В фазном роторе обмотки также постоянно закорочены, поэтому контактные кольца не требуются.
Асинхронный двигатель
 Наматывается на определенное количество полюсов. Можно использовать ротор с короткозамкнутым ротором или ротор с обмоткой. В роторе с короткозамкнутым ротором стержни ротора постоянно замкнуты накоротко концевыми кольцами. В фазном роторе обмотки также постоянно закорочены, поэтому контактные кольца не требуются.
Наматывается на определенное количество полюсов. Можно использовать ротор с короткозамкнутым ротором или ротор с обмоткой. В роторе с короткозамкнутым ротором стержни ротора постоянно замкнуты накоротко концевыми кольцами. В фазном роторе обмотки также постоянно закорочены, поэтому контактные кольца не требуются. Разница в работе
- Синхронный двигатель : Полюса статора вращаются с синхронной скоростью (Ns) при трехфазном питании.Ротор питается от источника постоянного тока. Ротор должен вращаться со скоростью, близкой к синхронной скорости во время запуска. В этом случае полюса ротора магнитно соединяются с вращающимися полюсами статора, и, таким образом, ротор начинает вращаться с синхронной скоростью.
- Синхронный двигатель всегда работает со скоростью, равной его синхронной скорости.
т. е. фактическая скорость = синхронная скорость
или N = Ns = 120f/P - Узнайте больше о работе синхронного двигателя здесь.
- Асинхронный двигатель : когда статор питается от двух- или трехфазного переменного тока, создается вращающееся магнитное поле (RMF). Относительная скорость между вращающимся магнитным полем статора и ротором вызовет индуцированный ток в проводниках ротора. Ток ротора вызывает поток ротора. Согласно закону Ленца, направление этого индуцированного тока таково, что он будет иметь тенденцию противодействовать причине его возникновения, то есть относительной скорости между RMF статора и ротора.Таким образом, ротор будет пытаться догнать RMF и снизить относительную скорость.

Прочие отличия
- Синхронным двигателям требуется дополнительный источник постоянного тока для питания обмотки ротора. Асинхронные двигатели не требуют дополнительного источника питания.
- Контактные кольца и щетки требуются в синхронных двигателях, но не в асинхронных двигателях (за исключением асинхронных двигателей с обмоткой, в которых двигатели с контактными кольцами используются для добавления внешнего сопротивления к обмотке ротора).
- Синхронным двигателям требуется дополнительный пусковой механизм для первоначального вращения ротора, близкого к синхронной скорости. В асинхронных двигателях пусковой механизм не требуется.
- Коэффициент мощности синхронного двигателя можно отрегулировать с отставанием, единицей или опережением путем изменения возбуждения, тогда как асинхронный двигатель всегда работает с отстающим коэффициентом мощности.
- Синхронные двигатели, как правило, более эффективны, чем асинхронные двигатели.
- Синхронные двигатели дороже.

и асинхронного двигателя —
Электродвигатели — это оборудование, используемое для преобразования электричества в механическую энергию. Они используют электромагнетизм для работы, что облегчает взаимодействие между электрическим током и магнитным полем двигателя. Это взаимодействие создает крутящий момент в проволочной обмотке, который заставляет вал двигателя вращаться. Электродвигатели часто используются в таких приложениях, как электроинструменты, бытовая техника, вентиляторы, гибридные или электрические транспортные средства и многие другие.
Электродвигатели часто используются в таких приложениях, как электроинструменты, бытовая техника, вентиляторы, гибридные или электрические транспортные средства и многие другие.
В этом сообщении блога мы рассмотрим, как работают электродвигатели переменного тока (AC), а также различные различия между синхронными и асинхронными двигателями.
Как работает электродвигатель переменного тока?
Двигатель переменного тока специально преобразует переменный ток в механическую энергию за счет использования процесса электромагнитной индукции. В этих двигателях используется статор и ротор для работы с переменным током, при этом статор остается неподвижным, а ротор вращается.
В зависимости от применения могут использоваться однофазные или трехфазные двигатели переменного тока.Трехфазные двигатели переменного тока идеально подходят для приложений, требующих большого преобразования мощности, в то время как приложения, требующие преобразования небольшой мощности, как правило, используют однофазные двигатели переменного тока. Например, однофазные двигатели переменного тока широко используются в жилых и коммерческих устройствах.
Например, однофазные двигатели переменного тока широко используются в жилых и коммерческих устройствах.
Существует две основные категории двигателей переменного тока: синхронные и асинхронные. Эти типы отличаются скоростью вращения ротора по сравнению со скоростью статора.
Сравнение синхронного двигателяи асинхронного двигателя
Принципиальное отличие этих двух двигателей состоит в том, что скорость вращения ротора относительно скорости статора у синхронных двигателей одинакова, а у асинхронных двигателей скорость вращения ротора меньше его синхронной скорости.Вот почему асинхронные двигатели также известны как асинхронные двигатели.
Асинхронный характер асинхронных двигателей создает скольжение — разницу между скоростью вращения вала и скоростью магнитного поля двигателя — что позволяет увеличить крутящий момент. Эти двигатели питаются от статора, а ротор индуцирует ток — отсюда и название «асинхронный» двигатель. Синхронные двигатели не имеют скольжения, потому что статор и ротор синхронизированы и требуют внешнего источника питания переменного тока.
Синхронные двигатели имеют два электрических входа, что делает их машинами с двойным возбуждением.В трехфазных синхронных двигателях обычно трехфазный переменный ток или другой вход питают обмотку статора, необходимую для облегчения создания крутящего момента. В качестве источника питания ротора часто используется постоянный ток, который либо запускает, либо возбуждает ротор. Когда поля статора и ротора замыкаются вместе, двигатель становится синхронным. Эти двигатели используются в таких приложениях, как электростанции, производственные предприятия и регулирование напряжения в линиях электропередачи.
В отличие от синхронных двигателей, асинхронные двигатели могут запускаться, когда они подают питание на статор, что устраняет необходимость в источнике питания для возбуждения или запуска ротора.Эти двигатели также имеют конструкцию с короткозамкнутым ротором или обмоткой, что привело к разработке таких типов двигателей, как асинхронные двигатели с пусковым конденсатором, асинхронные двигатели с короткозамкнутым ротором и двигатели с двойным короткозамкнутым ротором. Асинхронные двигатели используются в центробежных вентиляторах и компрессорах, конвейерах, токарных станках и лифтах.
Асинхронные двигатели используются в центробежных вентиляторах и компрессорах, конвейерах, токарных станках и лифтах.
Позвольте TLC помочь вам найти электродвигатель для вашего применения
Электрические двигатели используются в самых разных областях, от питания предприятий до небольших индивидуальных приложений, таких как бытовая техника.OEM-производителям и поставщикам электродвигателей нужны партнеры, которым они могут доверять для производства надежных деталей.
Thomson Lamination предлагает высококачественные штампованные компоненты для ламинирования электродвигателей. Мы можем производить большие объемы ламинирования ротора и статора с использованием металлов с высокой проводимостью для синхронных или асинхронных двигателей. Чтобы получить более подробную информацию о наших возможностях, свяжитесь с нами сегодня.
Разница между синхронным и асинхронным двигателем
Опубликовано Admin
Синхронный и асинхронный двигатель
Синхронная скорость двигателя переменного тока — это скорость вращения вращающегося магнитного поля, создаваемого статором.Синхронная скорость всегда является целой долей частоты источника питания. Синхронная скорость (n s ) асинхронного двигателя в оборотах в минуту (об/мин) определяется выражением, где f — частота источника переменного тока, а p — число магнитных полюсов на фазу.
Например, обычный трехфазный двигатель имеет 6 магнитных полюсов, организованных в виде трех противоположных пар, расположенных под углом 120° друг к другу по периметру статора, каждый из которых питается от одной фазы источника. В этом случае p = 2, а для частоты сети 50 Гц (частота питающей сети) синхронная скорость составляет 3000 об/мин.
Скольжение (с) — это изменение скорости вращения магнитного поля по отношению к ротору, деленное на абсолютную скорость вращения магнитного поля статора, и определяется по формуле, где n r — скорость вращения ротора. в об/мин.
в об/мин.
Подробнее о синхронных двигателях
Синхронный двигатель представляет собой двигатель переменного тока, в котором ротор обычно вращается с той же частотой вращения, что и вращающееся поле (поле статора) в машине. Другими словами, двигатель не имеет «скольжения» в обычных условиях работы, то есть s=0, и, как следствие, создает крутящий момент на синхронной скорости.Скорость синхронного двигателя напрямую зависит от количества магнитных полюсов и частоты источника.
Основными конструктивными элементами синхронного двигателя являются обмотка статора, подключенная к источнику переменного тока, который создает вращающееся магнитное поле, и ротор, помещенный в поле статора, питаемое постоянным током от токосъемных колец, образуя электромагнит.
Ротор представляет собой сплошную цилиндрическую отливку из стали, в случае машины без возбуждения. В двигателях с постоянными магнитами постоянные магниты находятся в роторе.Синхронные двигатели должны быть ускорены с помощью пускового механизма, чтобы получить синхронную скорость. На синхронной скорости двигатель работает без изменения скорости вращения.
На синхронной скорости двигатель работает без изменения скорости вращения.
Существует три типа синхронных двигателей; это реактивные двигатели, двигатели с гистерезисом и двигатели с постоянными магнитами.
Скорость вращения синхронного двигателя не зависит от нагрузки, если приложен достаточный ток возбуждения. Это позволяет точно контролировать скорость и положение с помощью элементов управления без обратной связи; они не меняют своего положения при подаче постоянного тока как на обмотки статора, так и на обмотки ротора.Конструкция синхронного двигателя позволяет повысить электрический КПД на низкой скорости, и требуется больший крутящий момент.
Подробнее об асинхронном двигателе
Если скольжение двигателя не равно нулю (), то двигатель называется асинхронным двигателем. Скорость вращения ротора отличается от скорости вращения поля статора. В асинхронных двигателях скольжение определяет создаваемый крутящий момент. Асинхронный двигатель является хорошим примером асинхронного двигателя, в котором основными компонентами являются короткозамкнутый ротор и статор. В отличие от синхронных двигателей, на ротор не подается электроэнергия.
В отличие от синхронных двигателей, на ротор не подается электроэнергия.
Синхронный двигатель и асинхронный двигатель
- Ротор асинхронного и синхронного линейных двигателей различен: в синхронных двигателях ток подается на ротор, а на ротор асинхронного двигателя ток не подается.
- Скольжение асинхронного двигателя не равно нулю, и крутящий момент зависит от скольжения, тогда как у синхронных двигателей нет, т.е.е. скольжение (с) =0
- Синхронные двигатели имеют постоянную скорость вращения при различных нагрузках, но скорость вращения асинхронного двигателя изменяется в зависимости от нагрузки.
16 Основное различие между синхронными и асинхронными двигателями
В этом посте мы изучаем разницу между двумя типами двигателей переменного тока (AC). Эти два двигателя переменного тока —
- Синхронный двигатель и
- Асинхронный двигатель.
Если вы готовитесь к экзамену, вивату или собеседованию, вам будут задавать вопросы: синхронные и асинхронные двигатели. Это очень важные темы в электротехнике.
Это очень важные темы в электротехнике.
Много раз вас будут просить сравнить эти два типа двигателей.
Здесь я сравниваю синхронный двигатель и асинхронный двигатель с их характеристиками, функциями, приложениями и примерами.
Примечание. Асинхронный двигатель называется «Асинхронный двигатель ».
Разница между синхронными и асинхронными двигателями
Давайте изучим сравнение обоих двигателей переменного тока в табличной форме.
| # | # #Content | синхронный мотор | |||
| 01 | Определение | [Что такое синхронный и индукционные моторы] | Электромагнитный мотор, который преобразует электрическую энергию в механическую работу с постоянной скоростью, называется синхронным двигателем. | Электромагнитный двигатель, который преобразует электрическую энергию в механическую работу с переменной скоростью, называется «асинхронным двигателем». | |
| 02 | Двигатель Скорость | Синхронный двигатель работает на синхронной скорости. | Асинхронный двигатель работает на асинхронной скорости. | ||
| 03 | Принцип | Синхронный двигатель работает по принципу «магнитной блокировки». | Асинхронный двигатель работает по принципу «электромагнитной индукции». | ||
| 04 | Начальное положение | Это двигатель без автоматического запуска. | Самозапуск двигателя. (особенно трехфазный асинхронный двигатель) | ||
| 05 | Подключенное питание (переменный и постоянный ток) | Состоит из двух основных частей — статора и ротора. Статор подключается к трехфазному источнику переменного тока, а ротор подключается к источнику постоянного тока соответственно. | Аналогично, он также состоит из двух основных частей — статора и ротора. Единственный статор подключается к трехфазной сети переменного тока. | ||
| 06 | Система возбуждения (источник постоянного тока для ротора) | Синхронному двигателю требуется система возбуждения постоянного тока (или первичный двигатель) для запуска двигателя (т. е. для вращения ротора). | Асинхронный двигатель не требует системы возбуждения для запуска двигателя. | ||
| 07 | Конструкция | Конструкция синхронного двигателя очень сложна. | Конструкция асинхронного двигателя относительно проста. | ||
| 08 | Относительное движение | Для синхронного двигателя относительное движение между статором и ротором не требуется. | Для асинхронного двигателя требуется относительное движение между статором и ротором. | ||
| 09 | Скольжение (магнитное поле в зависимости от скорости вращения ротора) | В синхронном двигателе возникает нулевое скольжение (S=0). | Различное скольжение происходит в асинхронном двигателе. | ||
| 10 | Скорость двигателя (в об.p.m) | Работает от 150 до 1800 об/мин . синхронная скорость. | Работает со скоростью менее 1500 об/мин. синхронная скорость. | ||
| 11 | Коэффициент мощности | Имеет единичный, отстающий или опережающий коэффициент мощности. В основном работает на единичном коэффициенте мощности. | Имеет только отстающий коэффициент мощности. | ||
| 12 | КПД (Отношение выходной и потребляемой мощности) | Синхронный двигатель имеет больший КПД благодаря единичному или ведущему коэффициенту мощности. | Асинхронный двигатель менее эффективен, чем синхронный двигатель. | ||
| 13 | Применение | Используется для коррекции коэффициента мощности, обслуживания нагрузки с постоянной скоростью, регулирования напряжения линии передачи и т. д. д. | В основном используется в промышленности. | ||
| 14 | Стоимость | Этот двигатель дороже, чем асинхронный двигатель. | Этот двигатель дешевле синхронного двигателя. | ||
| 15 | Техническое обслуживание | Требуется максимальное техническое обслуживание. | Требуется минимальное обслуживание. | ||
| 16 | Пример | Вентилятор, нагнетающий вентилятор, осушитель являются примером синхронного двигателя. | Конвейерная лента, прокатный стан, смеситель, измельчитель являются примерами асинхронного двигателя. |

Это все о разнице между синхронными и асинхронными двигателями.Также рассмотрены преимущества и недостатки этих двух двигателей переменного тока.
Надеюсь, это поможет вам при подготовке к экзамену или собеседованию. Если у вас есть какие-либо вопросы, напишите мне сообщение в разделе комментариев ниже.
Связанные сравнения:
Спасибо за прочтение!
Если вы цените то, что я делаю здесь, в DipsLab, вам следует подумать:
DipsLab — это самый быстрорастущий и пользующийся наибольшим доверием сайт сообщества инженеров по электротехнике и электронике.Все опубликованные статьи доступны всем БЕСПЛАТНО.
Если вам нравится то, что вы читаете, купите мне кофе (или 2) в знак признательности.
Это поможет мне продолжать оказывать услуги и оплачивать счета.
Я благодарен за вашу бесконечную поддержку.
Я получил степень магистра в области электроэнергетики. Я работаю и пишу технические руководства по ПЛК, программированию в MATLAB и электротехнике в DipsLab.ком портал.
Мне очень приятно делиться своими знаниями в этом блоге. И иногда я углубляюсь в программирование на Python.
Разница между синхронным двигателем и асинхронным двигателем
Двигатели переменного тока делятся на два типа: синхронные двигатели и асинхронные двигатели, которые также называются асинхронными двигателями. Самая большая разница между синхронными двигателями и асинхронными двигателями (асинхронными двигателями) заключается в том, соответствует ли скорость ротора скорости вращающегося магнитного поля в статоре.Если скорость вращения ротора и скорость возбуждения статора одинаковы, такой двигатель называется синхронным; если нет, то это асинхронный двигатель. Кроме того, между ними существуют большие различия в параметрах производительности и приложениях.
Самая большая разница между синхронными двигателями и асинхронными двигателями (асинхронными двигателями) заключается в том, соответствует ли скорость ротора скорости вращающегося магнитного поля в статоре.Если скорость вращения ротора и скорость возбуждения статора одинаковы, такой двигатель называется синхронным; если нет, то это асинхронный двигатель. Кроме того, между ними существуют большие различия в параметрах производительности и приложениях.
Различие в конструкции
Обмотки статора синхронных и асинхронных двигателей одинаковы, и основное различие заключается в конструкции ротора. В роторе синхронного двигателя имеются обмотки возбуждения постоянного тока, которые должны быть обеспечены внешним питанием возбуждения, вводимым через токосъемное кольцо.Однако обмотки ротора асинхронного двигателя короткозамкнуты, что создает ток за счет электромагнитной индукции. Напротив, синхронные двигатели более сложны и дороги.
- Статор
Компоненты статора синхронного двигателя в основном такие же, как и у асинхронных двигателей, играя роль приема, вывода электроэнергии и создания вращающегося магнитного поля. В форме результата особой разницы нет. Статоры как синхронного двигателя, так и асинхронного двигателя состоят из магнитного сердечника статора, токопроводящих трехфазных обмоток переменного тока, основания к фиксирующему сердечнику, клеммной крышки и т. д. - Ротор
Синхронный двигатель: сердечник полюса ротора ламинирован стальными листами, которые пробиты стальными пластинами. На сердечник полюса надеты обмотки возбуждения, намотанные изолированными медными проводами. Для синхронного двигателя с постоянными магнитами постоянный магнит на роторе является ключевым фактором, отличающим его от других двигателей.
Асинхронный двигатель: ротор состоит из железного сердечника и обмоток, изготовлен из ламинированных стальных листов и установлен на вращающемся валу.Существует два типа ротора: с короткозамкнутым ротором и с обмоткой. Асинхронный двигатель обмотки также оснащен контактным кольцом и щеточным механизмом.
 В форме результата особой разницы нет. Статоры как синхронного двигателя, так и асинхронного двигателя состоят из магнитного сердечника статора, токопроводящих трехфазных обмоток переменного тока, основания к фиксирующему сердечнику, клеммной крышки и т. д.
В форме результата особой разницы нет. Статоры как синхронного двигателя, так и асинхронного двигателя состоят из магнитного сердечника статора, токопроводящих трехфазных обмоток переменного тока, основания к фиксирующему сердечнику, клеммной крышки и т. д. Отличие Рабочий
1. Синхронный двигатель
Синхронный двигатель
Синхронный двигатель вращается за счет взаимодействия между вращающимся магнитным полем, создаваемым обмотками статора при включении, и магнитным полем, создаваемым ротором. Для синхронного двигателя с постоянными магнитами он вращается за счет крутящего момента, создаваемого взаимодействием между вращающимся магнитным полем статора и вторичным магнитным полем ротора.Что касается обмотки ротора, то она не индуцирует ток при нормальном вращении двигателя и также не участвует в работе. Он служит только для запуска двигателя.
При установившейся работе синхронного двигателя существует постоянная зависимость между скоростью вращения ротора и частотой сети:
N = Ns = 120f / p
f — частота сети, p — число полюсов двигателя, Ns — синхронная скорость.
2. Асинхронный двигатель
В сердечник статора трехфазного асинхронного двигателя встроены трехфазные симметричные обмотки.После включения питания между статором и ротором возникает вращающееся магнитное поле, которое вращается с синхронной скоростью. Стержень ротора разрезается вращающимся магнитным полем, в котором возникает индуцированный ток. Включающий стержень ротора подвергается действию электромагнитной силы во вращающемся магнитном поле, при этом ротор преодолевает вращение момента нагрузки и ускоряет свое вращение. Когда электромагнитный момент равен моменту нагрузки, двигатель вращается с постоянной скоростью.
Стержень ротора разрезается вращающимся магнитным полем, в котором возникает индуцированный ток. Включающий стержень ротора подвергается действию электромагнитной силы во вращающемся магнитном поле, при этом ротор преодолевает вращение момента нагрузки и ускоряет свое вращение. Когда электромагнитный момент равен моменту нагрузки, двигатель вращается с постоянной скоростью.
Скорость вращения асинхронного двигателя (скорость статора) меньше, чем скорость вращения магнитного поля, и эта разница называется «скольжением» и выражается в процентах от синхронной скорости:
S = (Ns-N) / Ns.
S — скольжение, Ns — скорость магнитного поля, N — скорость вращения ротора.
Разница в Применение
Синхронные двигатели в основном используются в больших генераторах, а асинхронные двигатели почти используются в качестве двигателей для привода машин.
Коэффициент мощности синхронного двигателя можно гибко регулировать с помощью возбуждения. Однако коэффициент мощности асинхронного двигателя не регулируется, поэтому на некоторых крупных фабриках для более применяемых асинхронных двигателей можно добавить синхронный двигатель в качестве фазового модификатора, чтобы отрегулировать коэффициенты мощности фабрики и интерфейса сети.Однако из-за высокой стоимости синхронных двигателей и большого объема технического обслуживания в настоящее время для компенсации коэффициента мощности обычно используются конденсаторы.
Однако коэффициент мощности асинхронного двигателя не регулируется, поэтому на некоторых крупных фабриках для более применяемых асинхронных двигателей можно добавить синхронный двигатель в качестве фазового модификатора, чтобы отрегулировать коэффициенты мощности фабрики и интерфейса сети.Однако из-за высокой стоимости синхронных двигателей и большого объема технического обслуживания в настоящее время для компенсации коэффициента мощности обычно используются конденсаторы.
Работа синхронного двигателя не так проста, как у асинхронного двигателя, потому что синхронный двигатель имеет обмотку возбуждения и токосъемное кольцо, требующие высокоуровневого управления возбуждением. Кроме того, по сравнению с необслуживаемым асинхронным двигателем работа по обслуживанию синхронного двигателя велика. Поэтому в качестве двигателя асинхронный двигатель является наиболее предпочтительным.
Синхронные и асинхронные двигатели: обнаружение различий
Упрощенное разделение двигателей с дробной мощностью: переменного тока, постоянного тока, бесщеточные и универсальные. Однако так же, как обувь можно разделить на рабочие ботинки, классические туфли, кроссовки и т. д., каждая двигательная категория имеет различные подгруппы. Например, двигатели переменного тока можно разделить на синхронные и асинхронные (также известные как асинхронные).
Однако так же, как обувь можно разделить на рабочие ботинки, классические туфли, кроссовки и т. д., каждая двигательная категория имеет различные подгруппы. Например, двигатели переменного тока можно разделить на синхронные и асинхронные (также известные как асинхронные).
Хотя оба работают от сети переменного тока (хотя синхронный также использует постоянный ток), их создание, работа и использование сильно отличаются.
Прежде чем разобрать две категории обсуждений переменного тока, важно иметь в виду, что в типичном двигателе переменного тока (как более подробно объяснено в нашем блоге Основы двигателя переменного тока ) вращающееся магнитное поле создается статором, имеющим индуцируется входным током. Скорость этого поля определяется частотой источника питания и числом полюсов машины и называется «синхронной скоростью», точнее, скоростью, возникающей одновременно.
Асинхронный двигатель
Когда говорят об асинхронных двигателях, обычно имеют в виду асинхронные двигатели переменного тока. Наиболее распространенный тип, асинхронный двигатель переменного тока с короткозамкнутым ротором, обычно имеет стационарную обмотку, называемую статором, а также ротор, сделанный из электротехнической стали и токопроводящих стержней из алюминия или меди, которые закорочены на каждом конце.
Наиболее распространенный тип, асинхронный двигатель переменного тока с короткозамкнутым ротором, обычно имеет стационарную обмотку, называемую статором, а также ротор, сделанный из электротехнической стали и токопроводящих стержней из алюминия или меди, которые закорочены на каждом конце.
Как указано выше, магнитное поле создается в статоре от переменного тока, который, в свою очередь, индуцирует токи в токопроводящих стержнях ротора. Этот эффект индукции домино приводит к притяжению между вращающимся магнитным полем статора и индуцированным магнитным полем ротора.Простое уравнение может помочь проиллюстрировать это более четко.
Питание переменного тока + статор = вращающееся магнитное поле #1 (синхронная скорость)
Вращающееся магнитное поле #1 + ротор = Вращающееся магнитное поле #2 (отставание от синхронной скорости)
Ротор, естественно, будет вращаться медленнее, чем синхронная скорость магнитного поля в статоре, но притяжение между компонентами статора и ротора ставит их в непрерывную игру в догонялки (за счет создания крутящего момента). Разница между этими двумя скоростями называется скольжением и обычно указывается в процентах от синхронной скорости.
Разница между этими двумя скоростями называется скольжением и обычно указывается в процентах от синхронной скорости.
Магнитное поле №1 (быстрее) – Магнитное поле №2 (медленнее) = Скольжение
Синхронный двигатель
Как вы могли догадаться, ротор синхронного двигателя вращается с той же скоростью, что и синхронная скорость. Это возможно, потому что синхронные двигатели основаны на частоте и не зависят от постоянства начального входного тока.
Представьте себе синхронисток на соревнованиях по прыжкам в воду. Их движения точно совпадают с движениями другого члена команды по плаванию — их начало, середина и точки входа потенциально идентичны.
Синхронные двигатели работают примерно так же. Однако точно так же, как потребовалось бы много времени, чтобы достичь такого уровня единообразия в их методах погружения, синхронные двигатели не достигают одинакового вращения между магнитными полями ротора и статора только с начальным входным током. Мощность переменного тока индуцирует статор (как типичный асинхронный двигатель), но затем он достигает точки запаздывания, мощность постоянного тока подается через возбудитель — устройство, которое подает на двигатель ток намагничивания для создания потока. Это позволяет вращению увеличиваться и связываться с синхронной скоростью, и, если на это не воздействуют экстремальные условия, эти скорости будут оставаться синхронизированными, что позволяет использовать высокоточные функции с помощью используемого приложения.
Мощность переменного тока индуцирует статор (как типичный асинхронный двигатель), но затем он достигает точки запаздывания, мощность постоянного тока подается через возбудитель — устройство, которое подает на двигатель ток намагничивания для создания потока. Это позволяет вращению увеличиваться и связываться с синхронной скоростью, и, если на это не воздействуют экстремальные условия, эти скорости будут оставаться синхронизированными, что позволяет использовать высокоточные функции с помощью используемого приложения.
Это подводит нас к краткому обзору того, как различная конструкция двигателей переменного тока позволяет каждому поддерживать свою индивидуальную и разнообразную работу и использование.
Синхронный:
- Более высокая начальная стоимость
- Требуется возбудитель
- Для высокоточных приложений (таких как часы или проигрыватель)
- Наиболее эффективен в больших промышленных двигателях
- Зависит от частоты (более согласованный)
Индукция:
- Потенциально более высокая стоимость жизненного цикла
- Специальные элементы управления обычно не требуются
- Более распространенный; используется во многих повседневных приложениях
- Наиболее эффективен в небольших приложениях
- Скорость зависит от крутящего момента
Как видите, асинхронные и синхронные двигатели, хотя и классифицируются как двигатели переменного тока, имеют довольно разные конструктивные и эксплуатационные характеристики, при этом наличие скольжения является наиболее важным фактором.